排序
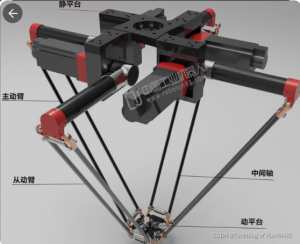
工业机器人(11)-串联机器人、并联机器人和混联机器人
机器人从机构学的角度可以分为串联机器人和并联机器人两大类。串联机器人以开环机构为机器人机构原型;并联机器人为有一个或几个闭环组成的关节点坐标相互关联的机器人。 串联机器...

工业机器人 (1)– 国内外研究现状
目录 1. 工业机器人简介 2. 国外机器人供应商 2.1瑞典 ABB 2.2 日本安川电机 2.3 日本FANUC 2.4 德国KUKA 3. 国产新松 1. 工业机器人简介 自1962年美国制造出第一台实用的示教型工业机器人以...
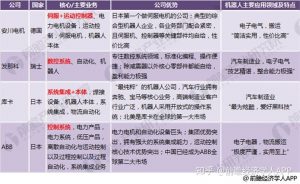
工业机器人(2 )- 全球先进机器人供应商对比
目录 1. 全球机器人四大家族企业各有所长 2. ABB机器人业务体量最大,库卡营收增速最快,发那科毛利率最高 3. 四大家族在中国竞争优势突出,逐渐扩大在中国的布局 数据来源参...
工业机器人(3)– Denavit–Hartenberg(D-H)参数
在机械工程中,Denavit-Hartenberg 参数(也称为 DH 参数)是与一个特定约定相关联的四个参数,用于将参考坐标系附加到空间运动链或机器人操作臂的连杆上。 “Jacques Denavit and Ri...
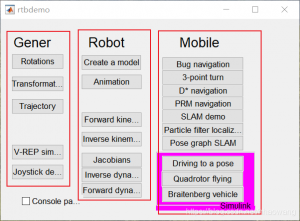
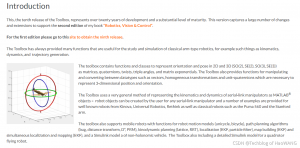
工业机器人(4)– Matlab Robot Toolbox运动学正、逆解
【Matlab Robotics Toolbox】robotics toolbox学习及使用记录,方便自己后面复习、改进。 基于Matlab R2019b 9.5; Peter Corke的Robotics Toolbox 10.3.1 目录 0. 前言 Robot toolbox- rt...

工业机器人(5)-串口通信技术与MODBUS协议
目录 1. 基本的通讯方式 扩展资料 串行和并行的区别 2. 串行通讯的两种方式 3. 根据传送方向分类 4. 串行通讯接口 5. RS485接口电路 6. 串口MODBUS通讯 7. MODBUS消息报文 8. MODBUS关键概...
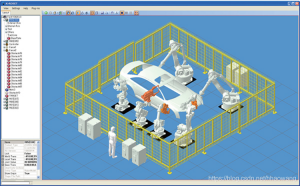
工业机器人(6)川崎机器人仿真软件K-ROSET
1. 机器人模拟软件 - K-ROSET K-ROSET是川崎的离线机器人模拟软件。该工具允许用户添加川崎机器人、外围设备、机器人工具及工件的3维模型到一个虚拟环境中并建立多机器人自动化工作单元。该软件...
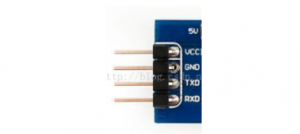
工业机器人(8)– UART和RS-232、RS-422、RS-485通信接口
目录 一、UART是什么 二、RS-232标准 三、RS-485/ RS-422标准 四、RS-232与RS-485对比 五、RS-422与RS-485对比 六、影响RS-485总线通讯速度和通信可靠性的三个因素 七、RS-485总线的负载能力和...
工业机器人(9)– Matlab机器人工具箱之创建单臂/双臂机器人SDH/MDH方法
目录 1. Matlab机器人工具箱 2. 创建MDH单机械臂 3. 创建MDH双臂机器人 UR构型双臂 如何进行轨迹仿真 4. MDH-双臂机器人 1. Matlab机器人工具箱 官方网站Robotics Toolbox | Peter Corke 下载...
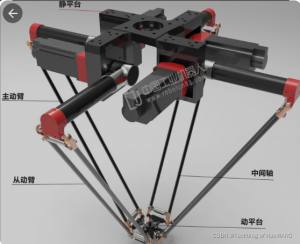
工业机器人(11)-串联机器人、并联机器人和混联机器人
机器人从机构学的角度可以分为串联机器人和并联机器人两大类。串联机器人以开环机构为机器人机构原型;并联机器人为有一个或几个闭环组成的关节点坐标相互关联的机器人。 串联机器...