排序
第38.2节 osg加载大tif-10.20活动直播资源&中秋活动参赛源码
目录 本节内容 本节内容 根据2021-10-20直播活动的内容,使用VPB处理影像高程的示例,将资源进行打包,里面使用的是VS2019,若使用其它版本的VS,则需要对应的OS...

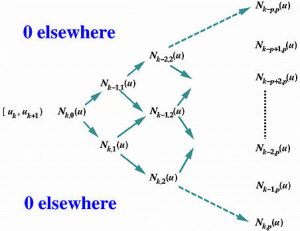
第二十一课,几何着色器(使用篇-爆破效果)
爆破效果 原理: 将每一个片元沿三角形法向量方向移动一段距离 核心代码 + 避坑点: .vert #version 450 core layout (location = 0) in vec3 aPos; layout (location &#...
第22.3节 性能篇-共享结点
天下武功,唯快不破 最近网友问了关于点云、倾斜摄影数据的性能优化问题。本来想刀枪剑戟、斧钺勾叉给弄了,但是后来想性能其实是个系统问题,要在第22节分成数小节扎扎实实...
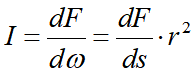
【XJTUSE计算机图形学】第四章 真实感图形学(2)——简单光照明模型
文章目录 【XJTUSE计算机图形学】第四章 真实感图形学(2)——简单光照明模型简单光照明模型相关物理知识光的传播光的度量 Phong光照明模型理想漫反射镜面反射光环境光 增量式光照明模型Gouraud...
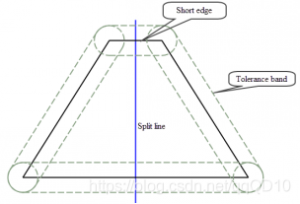
几何算法容差分类
1. 数值容差 数值大小:double数值计算精度16位, 4位舍入所以一般取 1.0e-12 建模核心数值公差(mm)OCCT1.0e-12Opennurbs1.0e-12ACIS1.0e-11 解决问题: 0.1+0.2 !==...
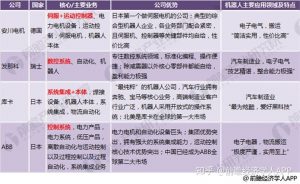
工业机器人(2 )- 全球先进机器人供应商对比
目录 1. 全球机器人四大家族企业各有所长 2. ABB机器人业务体量最大,库卡营收增速最快,发那科毛利率最高 3. 四大家族在中国竞争优势突出,逐渐扩大在中国的布局 数据来源参...
第22.5节 性能篇-设计一个简单的拣选策略
天下武功,唯快不破 最近网友问了关于点云、倾斜摄影数据的性能优化问题。本来想刀枪剑戟、斧钺勾叉给弄了,但是后来想性能其实是个系统问题,要在第22节分成数小节扎扎实实...

第八课,OpenGL光照之基本光照
冯氏光照模型(Phong Lighting Model) 环境光照(Ambient Lighting):即使在黑暗的情况下,世界上通常也仍然有一些光亮(月亮、远处的光),所以物体几乎永远不会...
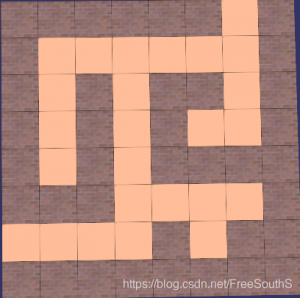
CGAL学习记录——点云体素采样
点云体素采样 方法一方法二 点云体素采样,参考PCL点云体素 方法一 #include <CGAL/Exact_predicates_exact_constructions_kernel.h> #include <CGAL/grid_simplify_point_set.h...

第六课,OpenGL的3D坐标系统
启动深度测试 glEnable(GL_DEPTH_TEST); 启动3D深度测试,绘制的图形不会因为先后顺序改变。 模型矩阵 glm::mat4 mode = glm::mat4(1.0f); mode = glm::rotate(mode, (float)gl...
第18节外传 网友配置18节代码中遇到的问题供稿
感谢热心网友:emmmm供稿。您若有想在此发表的文章,也可以发给我哦。 OSG编译过程问题汇总 注: 1、本文档以18.1节为例,进行错误汇总。 2、本文写出如果哪些地方不修...