
网格(Mesh)在数值计算中有着举足轻重的作用。主流的数值仿真方法诸如有限元,有限体积,有限元,边界元都是以网格为计算对象。而差分法等,时域有限差分等也是以网格(Grid)点为计算对象。
什么是好网格?
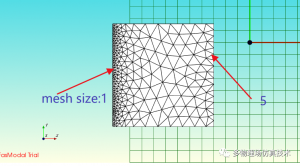
网格的好坏直接决定了仿真计算能否成功,以及正确性,精度,性能。
简单的说就是尽可能用最少的网格,最真实的反应物理量的变化规律。
常见的网格种类:
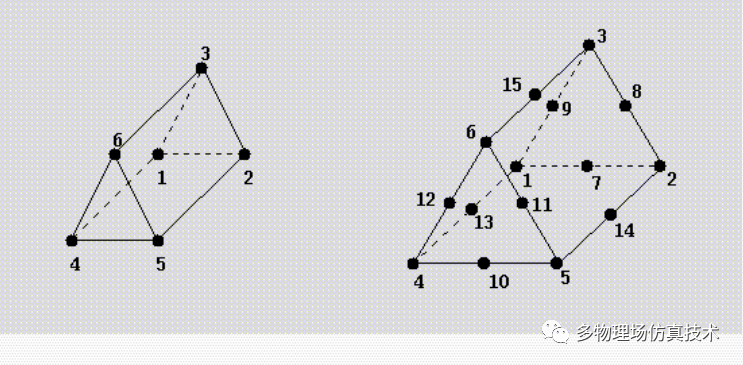
1. 三角形(Triangle)
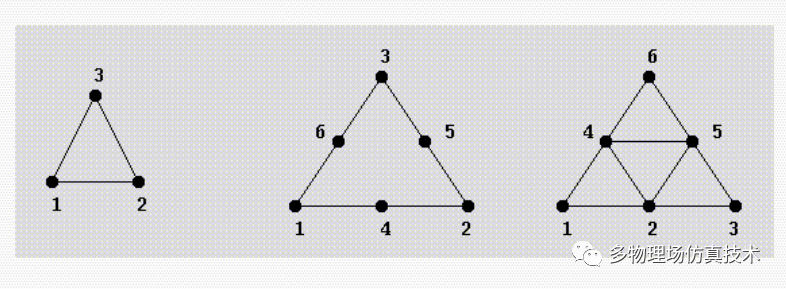
以上图形从左往右分别为
左> 0阶一次单元,3个顶点,3条边
中> 1阶二次单元,6个顶点,3条边
右> 拉格朗日1阶二次单元,6个顶点,6条边
以下单元类型可以类推
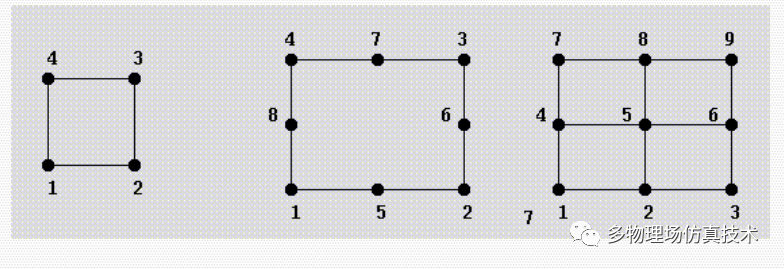
2. 四边形(Quadrilateral)
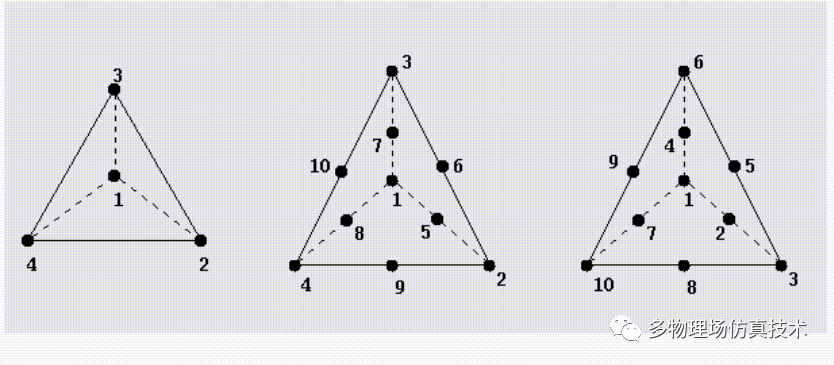
3. 四面体(Tetrahedron)
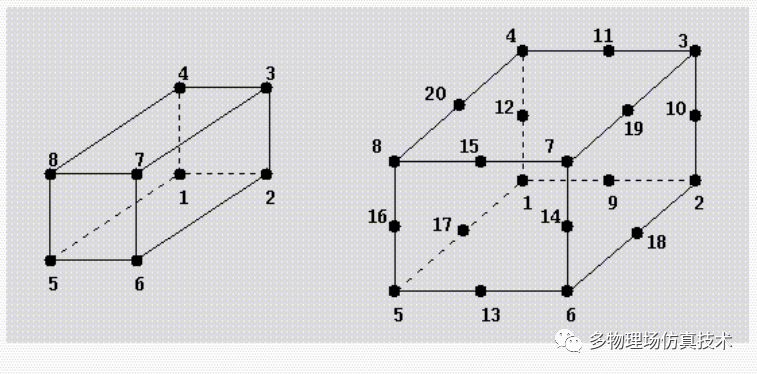
4. 六面体(Hexahedron)
5. 金字塔单元(Pyramid)

6. 楔形单元(Wdge)
网格的分类:
网格对应的英文有两个Mesh和Grid,Grid 的基本意思为格子,即四四方方非常规整的网格。
对于Mesh,我们通常分为结构化网格和非结构化网格。理解很简单,除了四边形和六面体是结构化网格,其它都是非结构化网格。
对于Grid,通常情况下我们用作有限差分方法的网格。
高阶单元:
除了上述我们提到的0阶1次单元以及1阶2次单元,在数值计算上还有更高阶的单元。高阶单元在数值计算上具有更高的精度,当然也会带来更大的计算量。在所有物理场的数值计算中,通常情况下1阶2次单元具有较好的性价比,即在精度和计算时间上有比较好的平衡。
以电磁矢量棱边3维四面体单元为例,其基函数自由度DOF与阶次的关系为:
DOF = (n+1)(n+3)(n+4)/2; n为阶的数值
n=0时,DOF=6
n=1时,DOF=20
n=2时,DOF=45
n=5时,DOF=216
以电磁矢量棱边3维六面体单元为例,其基函数自由度DOF与阶次的关系为:
DOF = 3(n+1)(n+2)(n+2)
n=0时,DOF=12
n=1时,DOF=54
n=2时,DOF=144
n=5时,DOF=882
也就是说对于5阶的六面体单元,其一个单元的刚度矩阵可达882*882,对于开发验证,复杂度远远高于常用的0阶和1阶单元。
几何和网格
在网格之前,我们通常拿到的都是几何数据,比如BREP结构,STL面片结构,或者参数化的几何结构。
几何离散成的三角形称之为“面片”,非网格,大部分显示引擎底层都使用三角形来渲染对象,因此2维、3维几何都需要三角化(称之为“面片化”),比如一个长方体共有6个面,每个面需要离散成两个三角形,总共12个三角形。这12个三角形我们称之为12个“面片”,而非网格!一般情况下“面片”质量很差。“面片”有两个功能:一是用来做显示渲染数据;二是可以作为网格划分的输入数据,用来生成面网格。
对于隐式曲线曲面,需要设置合适的离散参数,从网格端进行解析。
有限元方法中的单元和网格
网格是几何上的概念,单元则是数值方法中的概念。
弹簧只能在一个方向上发生变形,是典型的1维单元;同理壳单元(shell)需要XY两个方向来定义,是2维单元;四面体,六面体是3维单元,也称为实体单元;对象可以看做质点的为0维单元,比如称之为“定楼神球\”的调谐质量阻尼器。
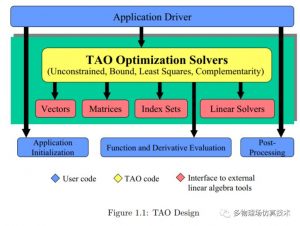
网格生成算法
网格生成算法无论是在理论还是实际应用中都比较成熟,后续将会详细介绍。在这个领域很难有颠覆式的发展,未来网格底层生成算法可以和实际工业应用更加紧密结合,优化网格生成效率。





![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)






暂无评论内容