
天下武功,唯快不破
最近网友问了关于点云、倾斜摄影数据的性能优化问题。本来想刀枪剑戟、斧钺勾叉给弄了,但是后来想性能其实是个系统问题,要在第22节分成数小节扎扎实实的讲一讲。
鸣谢
非常感谢王锐王大神的cookbook,我准备主要参考它里面关于性能的一章。也就是第8章。
本节资源
本文集包括本节所有资源包括模型代码都在此下载,按节的序号有文件或文件夹:
注意: 务必使用浏览器打开:
【击此打开网盘资源链接】
问题描述
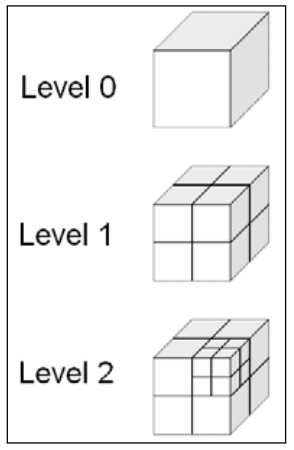
我们为什么使用googlEarth或者osgEarth的时候,原则上可以加载无限大的数据呢,其原因就是因为其使用的是树状的组织结构,如下:

我们仍然来拿地球来想象,Level0是最粗的球,我们离的很远的时候是这个球。Level1是我们拉近一点,地球会一分为八,然后我们再对着其中一个角拉近就分裂成Level2的模样,这个角又一分为八。
粗的级别就显示粗的内容,细的级别就加载细的内容,就像高清影像的瓦片一样,第0级可以是整个地球,分辨率是256X256,然后一分为八,每张图片的范围变成了第0级的八分之一,但是分辨率仍然是256×256,就越往下拉越清晰。
本节我们就来构建这样一个八叉树的结构,本节如果你搞明白了,就入门了八叉树的结构,因为在构建树状结构的时候往往会用到递归。理解起来还是有点费劲的。LOD和PagedLOD都大量的用作构建数字地球等,其实原理都和本节差不多。
本节功能
1、随机生成5000个球,坐标范围在[-500, 500]。
2、对这5000个球生成八叉树,其结束条件是这样的:当结点的孩子小于16个时认为是叶结点,就不再往下分了。或者树的深度大于32也不往下分了。3、每一层我们用一个LOD来保存,当离的很远时显示父亲(把包围盒绘制出来),当拉近时父亲就一分为八。直到显示叶结点。
听起来就晕了吧,一定要好好的缕一缕。

具体实现
1、随机生成小球没有什么好说的。我们将生成的所有的小球的包围盒都压在globalElements当中,将所有小球组成的最大包围盒记为globalBound
typedef std::pair<std::string, osg::BoundingBox> ElementInfo;
osg::BoundingBox globalBound;
std::vector<OctreeBuilder::ElementInfo> globalElements;
for ( unsigned int i=0; i<5000; ++i )
{
osg::Vec3 pos = randomVector( -500.0f, 500.0f );
float radius = randomValue( 0.5f, 2.0f );
std::stringstream ss; ss << "Ball-" << i+1;
osg::Vec3 min = pos - osg::Vec3(radius, radius, radius);
osg::Vec3 max = pos + osg::Vec3(radius, radius, radius);
osg::BoundingBox region(min, max);
globalBound.expandBy( region );
globalElements.push_back( OctreeBuilder::ElementInfo(ss.str(), region) );
}
2.2、然后我们直接就开始调用OctreeBuilder的build方法开始构建八叉树:
OctreeBuilder octree;
osg::ref_ptr<osg::Group> root = octree.build( 0, globalBound, globalElements );
2.3、build是个递归方法,有三个参数,第一个是当前级别,第二个是当前包围盒,第三个是当前元素,其中主要干了以下几件事:
a) 先把当前包围盒的最大点、中间点、最小点给记录下来到extentSet中,以便以这三个数为界一分为八:
//存放当前包围盒的最大、中间、最小点,以为划分八叉树做准备
osg::Vec3 extentSet[3] = {
total._min,
(total._max + total._min) * 0.5f,
total._max
};
b) 把当前元素每个都判断一下是不是在当前盒子中,有人说了build(0,…)的时候那不废话吗,肯定都在盒子里了。但是build(1,…)的时候就不一定了。这一步是要判断传入的元素(往往是父结点的所有元素)是不是在当前盒子(子结点的盒子里),因此要进行判断:
std::vector<ElementInfo> childData;
//遍历父结点的所有孩子,让包含在当前盒子里的,不完全包含但是中点在盒子里的,都压入到
//当前盒子的子结点
for ( unsigned int i=0; i<elements.size(); ++i )
{
const ElementInfo& obj = elements[i];
if ( total.contains(obj.second._min) && total.contains(obj.second._max) )
childData.push_back( obj );
else if ( total.intersects(obj.second) )
{
osg::Vec3 center = (obj.second._max + obj.second._min) * 0.5f;
if ( total.contains(center) ) childData.push_back( obj );
}
}
c) 判断完成之后,要看看当前盒子里的元素数量和级别,以此来判断当前盒子是不是叶结点
//如果当前结点的孩子数量已经达标,或者层数已经达标,则认为
//是叶结点
bool isLeafNode = false;
if ( (int)childData.size()<=_maxChildNumber || depth>_maxTreeDepth )
isLeafNode = true;
d) 如果不是叶结点,就继续再一分为八,这个时候就把a)里面存的数字extentSet,拿它来将空间分成八个盒子:
osg::ref_ptr<osg::Group> childNodes[8];
//空间一分为八2*2*2
for ( s[0]=0; s[0]<2; ++s[0] ) //x
{
for ( s[1]=0; s[1]<2; ++s[1] ) //y
{
for ( s[2]=0; s[2]<2; ++s[2] ) //z
{
// Calculate the child extent
//extentSet 0是最小,1是中间,2是最大
//下面这个小算法有点磨人,分另求出min和max的x, y, z自己好好推几个试试
osg::Vec3 min, max;
for ( int a=0; a<3; ++a )
{
min[a] = (extentSet[s[a] + 0])[a];
max[a] = (extentSet[s[a] + 1])[a];
}
//这么求id是为了确保唯一性
int id = s[0] + (2 * s[1]) + (4 * s[2]);
childNodes[id] = build( depth+1, osg::BoundingBox(min, max), childData );
}
}
}
e) 如果是叶结点,那就构建一个LOD,离的远时,拿其父的包围盒构建一个盒子,离的近的时候就显示叶结点(小球)。
else //找到叶结点,递归就结束了
{
for ( unsigned int i=0; i<childData.size(); ++i )
{
const ElementInfo& obj = childData[i];
osg::Vec3 center = (obj.second._max + obj.second._min) * 0.5;
float radius = (obj.second._max - obj.second._min).length() * 0.5f;
//创建一个球
group->addChild( createElement(obj.first, center, radius) );
}
}
osg::Vec3 center = (total._max + total._min) * 0.5;
float radius = (total._max - total._min).length() * 0.5f;
//最后创建一个LOD,离的远了显示调试盒子,离的近了显示分的组
osg::LOD* level = createNewLevel( depth, center, radius );
level->insertChild( 0, createBoxForDebug(total._max, total._min) ); // For debug use
level->insertChild( 1, group.get() );
return level;
最后
理解了这一节,真算是你这个关于八叉树,四叉树方面算是有感觉了。你可能会有疑问,只有最底层才显示东西,这样的结构有什么用,因此你可以将小球进行抽稀,给每一级都放个球,这样就不会只显示一个空盒子了。地球就是这样的,父结点也有纹理高程,子结点也有纹理高程。






![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)









暂无评论内容