
Abstract. 精确HLR算法是根据模型生成图纸的重要算法,使用精确HLR算法,对于球体、圆柱体、圆锥体可以生成直线和圆弧,为生成的图纸再加工提供一些便利。OpenCASCADE中精确HLR算法较Poly算法要慢,但是功能可用,实现原理简单,主要是比较边和面的遮挡关系,还是有参考学习价值。本文主要关注精
确HLR算法中重要数据边的数据。
Key Words. HLR, Outline, Contour, Iso Line
1 Introduction
OpenCASCADE中总体上都在遵循程序Programs=数据结构Data Structure+算法Algorithms的原则。如功能模块命名上:ModelingData, ModelingAlgorithms,布尔算法中的Package命名BOPDS, BOPAlgo,再到精确HLR算法中的类也是这样来命名:HLRBRep_Data, HLRBRep_Algo。编写程序时,先设计好输入输出的数据结构,再以此为基础构筑相关算法,从而实现一定的程序功能。HLR算法的实现原理在文档中由一句话描述:Comparing each edge of the shape to be visualized with each of its faces, and calculating the visible and hidden parts of each edge. 用每条边去和每个面判断遮挡关系,计算出边的可见和隐藏部分。在精确HLR的数据结构HLRBRep_Data中主要就是存储边HLRBRep_EdgeData和面HLRBRep_FaceData的数据。本文通过将边的数据可视化出来,分析HLRBRep_Data中的数据。
2 HLR边的分类
OpenCASCADE对于精确HLR算法中边主要分为三类:拓扑边Edge,轮廓线Outline和等参线Iso Line。其中拓扑边根据边的连续性又分为:Sharp Edge, Smooth Edge, Sewn Edge. 如下图所示为官方文档中关于边的分类说明:
 对于轮廓线和等参线都需要有对应的算法来生成。对HLR算法中边的数据生成算法和数据结构都在package HLRTopoBRep中,其中生成轮廓线的算法类为HLRTopoBRep_OutLiner,生成等参线的算法类为HLRTopoBRep_FaceIsoLiner。所有数据都存储到HLRTopoBRep_Data中。这里有个定义:对于没有自交self-intersecting的线来说是简单曲线Simple Curve。
对于轮廓线和等参线都需要有对应的算法来生成。对HLR算法中边的数据生成算法和数据结构都在package HLRTopoBRep中,其中生成轮廓线的算法类为HLRTopoBRep_OutLiner,生成等参线的算法类为HLRTopoBRep_FaceIsoLiner。所有数据都存储到HLRTopoBRep_Data中。这里有个定义:对于没有自交self-intersecting的线来说是简单曲线Simple Curve。
3 等参线
面上等参线Isoparameter是曲面的参数方程S(u, v)其中一个参数固定,另一个参数变化生成的曲线。对于Geom_Surface提供UIso()和VIso()函数来计算曲面上的等参线。当面上有孔洞时,如何得到正确的等参线是个需要思考的问题。等参线的计算使用类HLRTopoBRep_FaceIsoLiner,核心算法是使用Hatcher工具来进行计算,相关类的实现说明可以参考之前写的文章《Hatcher的使用》。
 从目前一些商业软件的出图功能来看,给模型增加ISO线的需求较少,一般出图时不生成ISO线。
从目前一些商业软件的出图功能来看,给模型增加ISO线的需求较少,一般出图时不生成ISO线。
4 轮廓线
轮廓线是模型根据投影方向计算得到的线,计算轮廓线的功能实现在Contap中的类Contap_Contour。轮廓线是在指定的投影方向上曲面可见和不可见的分界线,即曲面上法向与投影方向垂直的点的连线。轮廓线的计算还考虑透视投影和平行投影。如果只指定一个视点,则按透视投影计算轮廓线。如果指定投影方向,则按平行投影计算轮廓线。通过HLRTopoBRep_OutLiner::Fill()函数来计算。
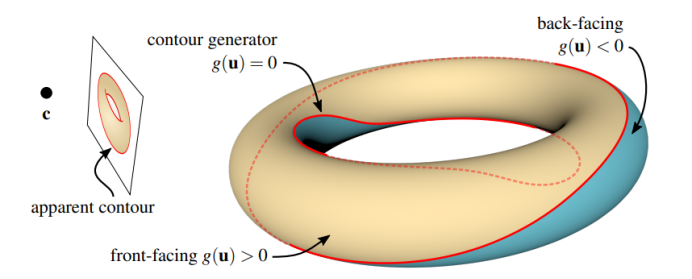 对于球面、圆柱面和圆锥面,提供几何特例算法,使用类Contap_ContAna直接计算出轮廓线。若是其他曲面,则使用类Contap_SurfFunction建立轮廓线方程,并对其进行求解来计算轮廓线。轮廓线使用类Contap_Line表示,得到的轮廓线分为四类:
对于球面、圆柱面和圆锥面,提供几何特例算法,使用类Contap_ContAna直接计算出轮廓线。若是其他曲面,则使用类Contap_SurfFunction建立轮廓线方程,并对其进行求解来计算轮廓线。轮廓线使用类Contap_Line表示,得到的轮廓线分为四类:
-
Contap_Lin:直线,如圆柱侧面投影会得到两条直线;
-
Contap_Circle:圆,如球面投影会得到圆;
-
Contap_Walking:一般曲面轮廓线,因为使用Walking(Marching Method)算法求解一般曲面的轮廓线二元函数方程,所以得到的是Walking线;
-
Contap_Restriction:边界线上的一部分。
从上述轮廓线类型可以看出,使用精确HLR算法,对于球面、圆柱面和圆锥面进行消隐,可以得到直线和圆这种精确表示。计算得到的轮廓线会结合面的参数定义域Domain对轮廓线进行裁剪,处理参数定义域的类是BRepTopAdaptor_Tool。
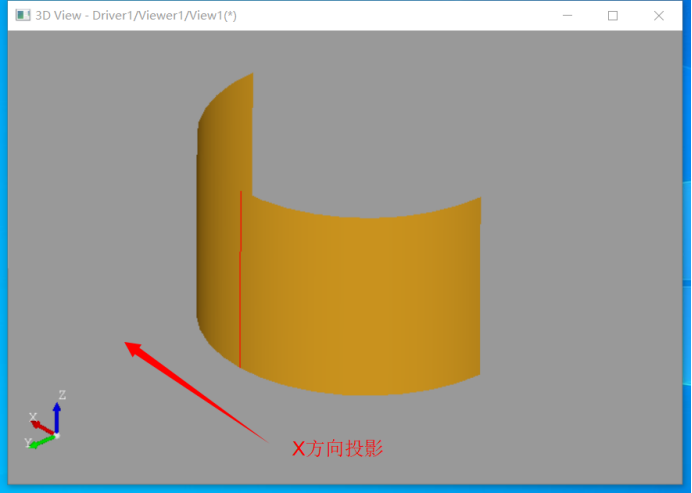 如上图所示一半的圆柱面在X方向投影得到的轮廓线只有一条红色的直线。
如上图所示一半的圆柱面在X方向投影得到的轮廓线只有一条红色的直线。
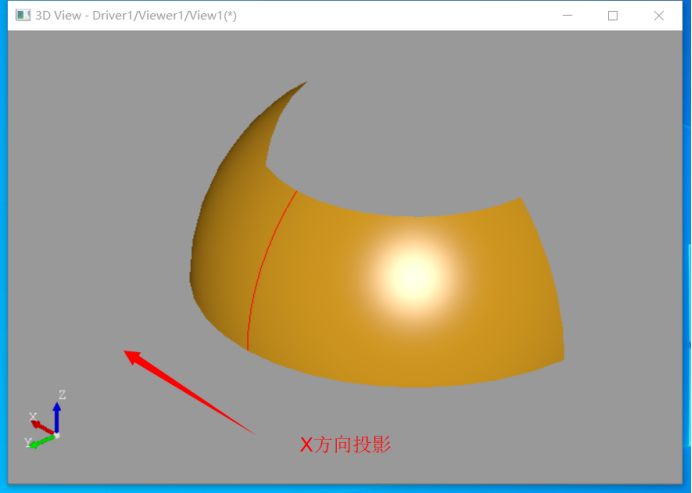 如上图所示部分球面在X方向投影得到的轮廓线也是红色的圆弧,不是整圆。通过曲面的参数定义域,已经将所得到的轮廓线限制在参数定义域内。如果是Walking得到的轮廓线,返回是Marching过程中的一系列点,会对这些点进行拟合。对于轮廓线也分成两类,一种是内部轮廓线internal outline,一种是在边界上的轮廓线outline on restriction。
如上图所示部分球面在X方向投影得到的轮廓线也是红色的圆弧,不是整圆。通过曲面的参数定义域,已经将所得到的轮廓线限制在参数定义域内。如果是Walking得到的轮廓线,返回是Marching过程中的一系列点,会对这些点进行拟合。对于轮廓线也分成两类,一种是内部轮廓线internal outline,一种是在边界上的轮廓线outline on restriction。
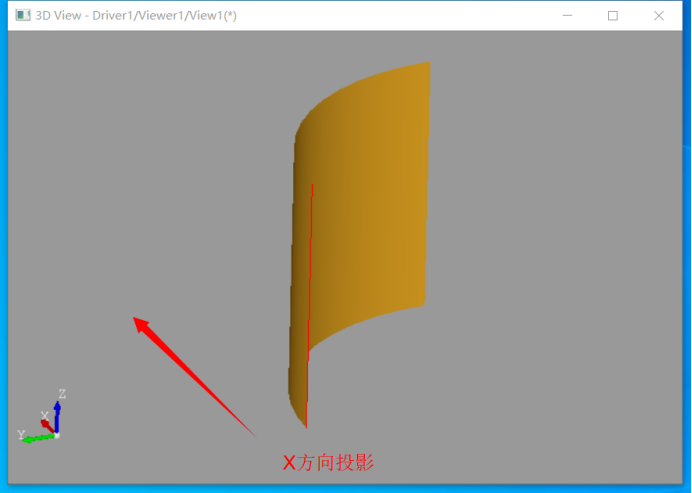 当轮廓线在边界上的时候,返回的轮廓线类型为Restriction。如上图所示为四分之一圆柱面沿X方向投影得到的轮廓线为Restriction轮廓线。
当轮廓线在边界上的时候,返回的轮廓线类型为Restriction。如上图所示为四分之一圆柱面沿X方向投影得到的轮廓线为Restriction轮廓线。
5 Conclusion
OpenCASCADE中HLR算法的代码可读性较差,但是功能基本上是可用的,有参考学习价值。HLR算法相对布尔算法来说要简单,理解HLR算法为实现根据模型生成图纸的功能打下基础。HLR算法主要思路是来判断线与面的遮挡关系,线的数据来源除了EDGE以外,还有等参线和轮廓线。理解线的数据结构后,下一步来理解面的数据结构,从而能掌握HLR算法甚至对其进行改造。
独乐乐不如众乐乐!借助开源代码,可以高效学习。学习其数学应用的思想,而这个思想不局限于解决几何问题。最后借用《为学》中的故事与大家共勉:
蜀之鄙有二僧,其一贫,其一富。
贫者语于富者曰:“吾欲之南海,何如?”
富者曰:“子何恃而往?”
曰:“吾一瓶一钵足矣。”
6 参考文献
1 Gershon Elber, Elaine Cohen. Hidden Curve Removal for Free Form Surfaces. 1990
2 PIERRE BENARD, AARON HERTZMANN, MICHAEL KASS. Computing Smooth Surface Contours with Accurate Topology. 2014
3 Pierre Bénard, Aaron Hertzmann, LINE DRAWINGS FROM 3D MODELS: A Tutorial. 2019

![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)









暂无评论内容