
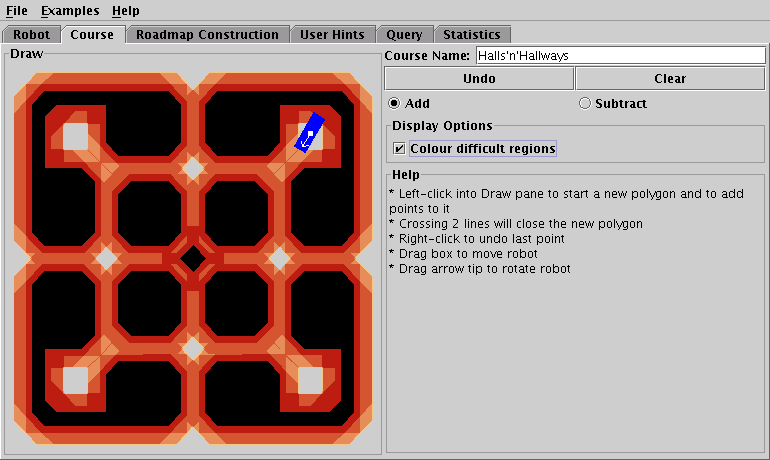
PRPVis(可视化的概率路线图规划)是一个概率为基础的规划与几个自由度,如机器人,物体的运动方法。该项目PRPVis提供了教学对学生的算法,该算法用于交互式可视化。
在线演示(浏览器需要Java运行环境的支持)
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END

PRPVis(可视化的概率路线图规划)是一个概率为基础的规划与几个自由度,如机器人,物体的运动方法。该项目PRPVis提供了教学对学生的算法,该算法用于交互式可视化。
在线演示(浏览器需要Java运行环境的支持)















暂无评论内容