

前言:
为固高GTS系列运动控制编程手册中运动模式概念的认知学习,并不涉及编程。
0 运动模式
GTS 系列运动控制器每个轴都可以独立工作在点位、Jog、PT、PVT、电子齿轮或 Follow运动模式(电子凸轮)下。
1 点位运动
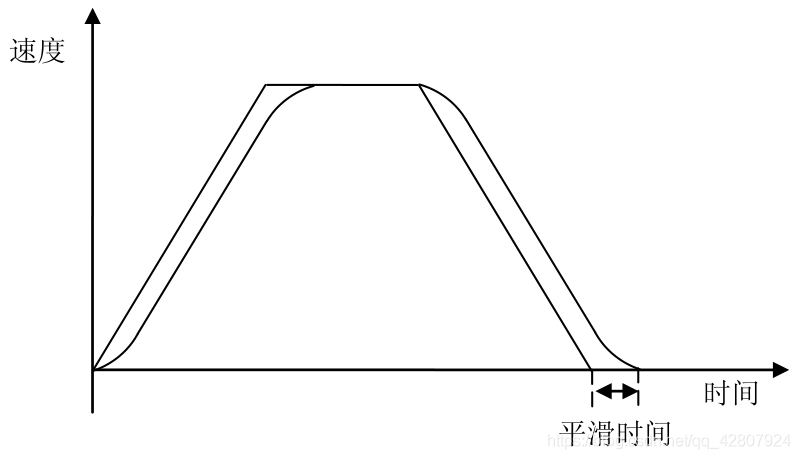
在点位运动模式下,各轴可以独立设置目标位置、目标速度、加速度、减速度、起跳速度、平滑时间等运动参数,能够独立运动或停止。调用 GT_Update 指令启动点位运动以后,控制器根据设定的动参数自动生成相应的梯形曲线速度规划,并且在运动过程中可以随时修改目标位置和目标速度。设定平滑时间能够得到平滑的速度曲线,从而使加减速过程更加平稳,如图所示。

2 Jop模式
在 Jog 运动模式下,各轴可以独立设置目标速度、加速度、减速度、平滑系数等运动参数,能够独立运动或停止。调用 GT_Update 指令启动 Jog 运动以后,按照设定的加速度加速到目标速度后保持匀速运动,在运动过程中可以随时修改目标速度,如图所示:

设定平滑系数能够得到平滑的速度曲线,从而使加减速过程更加平稳。平滑系数的取值范围是[0,1),越接近 1,加速度变化越平稳。
3 PT模式
PT 模式非常灵活,能够实现任意速度规划。用户通过直接输入位置和时间参数描述运动规律。PT 模式使用一系列“位置、时间”数据点描述速度规划,用户需要将速度曲线分割成若干段,如下图所示。

用户只需要给出每段所需时间和位移,运动控制器会计算段内各点的速度和位置,生成一条连续的速度曲线。为了得到光滑的速度曲线,可以增加速度曲线的分割段数。在描述一次完整的 PT 运动时,第 1 段的起点位置和时间被假定为 0,各段的终点位置和时间都是相对于第 1 段的起点的绝对值。位置的单位是脉冲,时间单位是毫秒。
4 电子齿轮模式
电子齿轮模式能够将 2 轴或多轴联系起来,实现精确的同步运动,从而替代传统的机械齿轮连接。电子齿轮模式能够灵活的设置传动比,节省机械系统的安装时间。电子齿轮模式下,1 个主轴能够驱动多个从轴,从轴可以跟随主轴的规划位置、编码器位置。为了减少跟随滞后,从轴的轴号应当大于主轴的轴号。电子齿轮模式能够在线修改传动比,当改变传动比时,可以设置离合区间,实现平滑变,如图所示。

主轴匀速运动,从轴为电子齿轮模式,在离合区 1 从轴的传动比从 0 逐渐增大到设定传动比。当改变传动比时,在离合区 2 从轴的传动比逐渐变化到新的传动比。离合区越大,从轴传动比的变化过程越平稳。
5 Follow 模式
在很多应用中,2 轴或多轴之间需要保证位置同步和速度同步。如图所示:
位置同步点表示主轴和从轴必须同时到达各自指定位置。速度同步区表示主轴和从轴之间必须保持准确的速度比。
- 第 1 段是加速区,从轴逐渐加速,直至到达同步速度。
- 第 2 段是速度同步区,从轴和主轴保持设定的速度比,速度同步区结束时,主轴和从轴同时到达位置同步点。
- 第 3 段是加速区,从轴穿越位置同步点以后迅速加速,脱离速度同步区。
- 第 4 段是减速区,从轴逐渐减速到 0。
为了减少跟随滞后,从轴的轴号应当大于主轴的轴号。
6 插补运动模式
插补运动模式可以实现多轴的协调运动,从而完成一定的运动轨迹。该插补运动模式具有以下一些功能,可以实现直线插补和圆弧插补;可以同时有两个坐标系进行插补运动;每个坐标系含有两个缓存区,可以实现缓存区暂停、恢复等功能;具有缓存区延时和缓存区数字量输出的功能;具有前瞻预处理功能,能够实现小线段高速平滑的连续轨迹运动。
7 PVT 模式
PVT 模式使用一系列数据点的“位置、速度、时间”参数来描述运动规律。





![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)






暂无评论内容