
欢迎加群
机械自动化相关群:1105076200
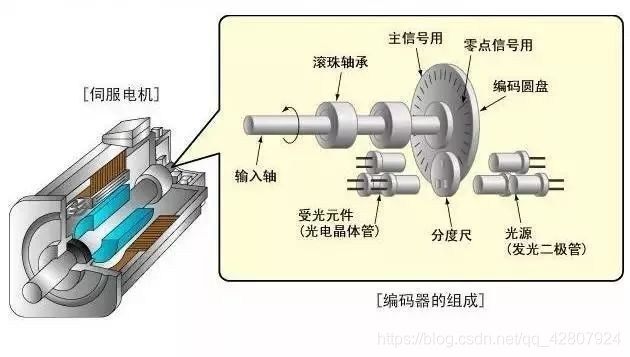
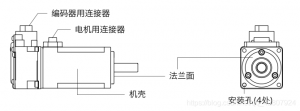
交流伺服电机
伺服电机主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位。

伺服控制原理主要是基于三环控制:
- 位置环:比较检测信号与给定值,输出速度环的指令速度,使执行件位置与指令位置一致。
- 速度环:根据位置环的指令速度快速而准确控制电机,使得其不受负载影响,并快速跟踪指令速度的变化。
- 电流环:根据速度环的指令电流快速而准确控制电机。


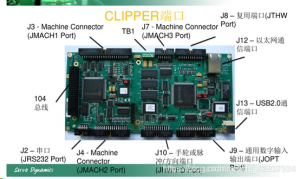
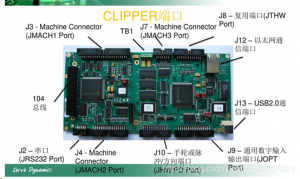
伺服电机驱动器
1.1 确认机型代码,不同机型具体参数不同,博主手头型号为MBDHT2510。
部件名称和实物对照













© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END


![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)





暂无评论内容