
背景知识
控制理论知识:整定。
指南链接:
整定: 解释为啥要整定
文大侠:PMAC下位机-PMAC安装参数设置
官网手册:SOFTWARE REFERENCE MANUAL,即软件参考手册。
经典老教程: PMAC入门教程-让电机动起来。
I变量 是啥?
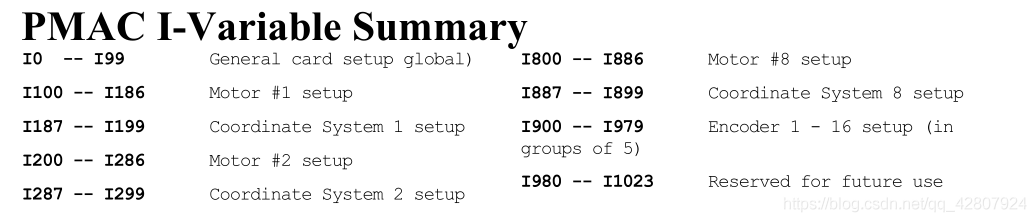
I变量决定系统的工作特性,如设置电机速度方向,精度,回零以及PID参数等。 这些变量的值被保存在内存里的固定位置,并有预定好的意义,改变I变量的值即改变其某种设定,如激活电机1,则设置,I100=1,反则I100=0。共有1024个I变量,从I0到I1023 ,如下所示:

所有变量定义见官网手册:SOFTWARE REFERENCE MANUAL,即软件参考手册。

整定伺服驱动的方法就是配置I变量的方法。
配置I变量的方法共有3种:
- Setup程序引导
- 终端Termianl输入指令
- Configure
I变量配置面板直接修改
本文介绍第一个方法Setup程序引导 。
Setup程序引导整定
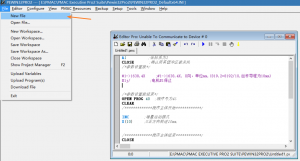
对于 Turbo卡,打开Pewin32Pro32程序,打开对于Setuo程序,如下图

建立通讯,如不会,看上篇。Start开始。



根据上述操作尝试要配置的I变量及其值,OK发送配置。

I7000=6527
I7001=0
I7002=3
I10=3713991
选择Stepper


I101=0
I100=1

I7016=3
I102=$78004
I169=32767
I7003=1754
I130=1398
I131=0
I132=15042
忽略AMP错误,关闭行程限制开关。

I125=$78000
I124=$120001
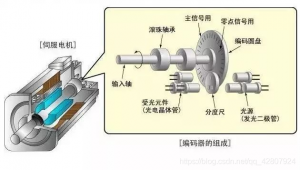
增量式编码盘


I103=$3501
I108=96
I7010=8


I109=96



Congratulations!
You have successfully completed the tuning of motor 1. At this point,
you are ready to begin to write your motion programs for this motor.
Before you utilize this motor, make sure Ix00 is set to 1.
To setup another motor, select its motor number from the list at the top.
祝贺你!
您已成功完成马达1的调谐。在这一点上,
你已经准备好开始为这个马达编写运动程序了。
使用此电机之前,请确保IX00设置为1。
要设置另一个电机,请从顶部的列表中选择其电机编号。
到此我们成功整定了电机1的驱动特性。所有I变量的配置:
I7000=6527
I7001=0
I7002=3
I10=3713991
I101=0
I100=1
I7016=3
I102=$78004
I169=32767
I7003=1754
I130=1398
I131=0
I132=15042
I125=$78000
I124=$120001
I103=$3501
I108=96
I7010=8
I109=96
电机1设定完毕之后,打开Pewin32Pro2,打开Terminal界面、Motor Status界面和Position监控界面。

在命令行中输入save命令将当前配置的参数写到EEPROM中,这样下次启动时就会使用新配置的参数。同时可以使用备份Backup Upload Configuration将参数备份到磁盘文件中以防止意外修改了当前参数可以使用Restore Configuration来恢复参数。

别忘了看手册!!!
变量IPQM

I 变量
决定系统的工作特性,如设置电机速度方向,精度,回零以及PID参数等。
P 变量
进行 PLC 编程计算时可以使用的全局变量,在编程中既可以对它做修改或计数,还可以用它作为软件触发,P 变量也无需预先定义,可直接使用。它可以作为中间变量,即可以通过程序改变它的值,也可以把它赋值给其他变量。P 变量包括从 P0 到 P1023,共计 1024 个变量。
Q变量
是坐标系变量,多个坐标系可以使用相同的 Q-变量,没有存储单元冲突。如果只有一个坐标系系统 1 ,Q0 到 Q8191 能被用于坐标系系统 1 (&1)。 对于 2 个坐标系,它们中的每一个都可以使用 Q0 到 Q4095 在 C.S1 和 C.S2 中 Q0分别占据不同的寄存器,这意味着没有内存冲突。如果使用 16 个坐标系,每一个坐标系可以使用 Q0 到 Q511 而没有冲突。
M 变量
这种变量可以读取控制卡的内存和控制系统的输入与输出的地址指针,类似C 语言的指针型变量。与以上几种变量不同,M 变量没有预先定义,只有定义好地址后,M 变量访问 PMAC 的地址。M 变量一旦定义好后,可用于计算和判别触发。M 变量的功能为存取 PMAC 的内存和 I/O 点,M 变量定义好后,通过卡的后备电池保存到运动控制卡的存储器中。


![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)




暂无评论内容