
按照经典老教程,我们让电机动起来要经过以下
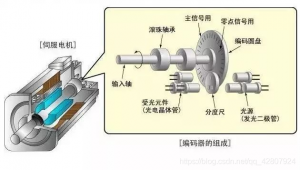
- 编码器反馈测试
- 设置电机输出指令
- 激活电机
- 屏蔽报警
- 开环测试
- PID调整
6个前期工作,最后才可以JOG,即手动操作方式,让电机走起来。
指南资料
官网手册: Hareware reference MANUAL Turbo PMAC Clipper,即Clipper卡的硬件参考手册。
官网手册:SOFTWARE REFERENCE MANUAL,即软件参考手册。
经典老教程: PMAC入门教程-让电机动起来。
前言吹水(看了保无“BUG”)
从整个教程架构上来看,这篇专栏并不科学,但真实,是博主接触PMAC,到基本使用的过程记录。现在才真正玩一个电机,但前期的工作并不是没有用处,希望读者能从第一篇看起,只有前面的铺垫,从原理出发,而不是单纯看操作,才能从原理上了解开发步骤,慢慢才有大局观。当出现问题时,我们能更容易把握主要矛盾和矛盾的主要方面。本记录教程也秉着一种授人以鱼不如授人以渔的精神。很多时候博主都列出了原始资料,哪一步操作涉及到哪些官方的资料,而不是单纯的写下操作,然后读者不知头不知尾,这里能用的教程,换种情况就不认识了,所以看到这些用户手册要慢慢来,我觉得这也可以帮助得到意外的收获。
硬件列表
MR2数字步进驱动器:http://www.ican-tech.com/product/detail/138.html
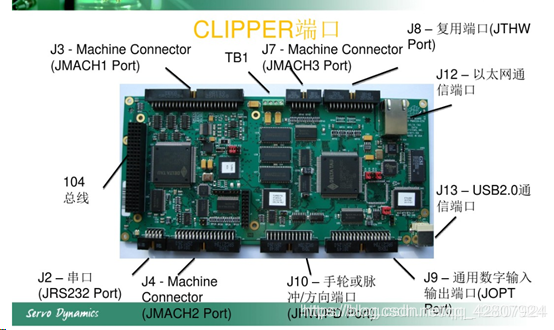
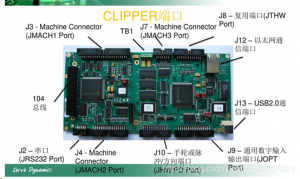
CLIPPER 卡
5V 12V 直流电源
电路接线(可跳过看驱动部分)
从下图我们也可以看出Clipper板可控制4个电机。


由上面J4端口引脚定义,接线如下,步进电机采用了共阴极接法,当然要通过转接板和IDC排线来连接电路。标志为什么要接5V待探索 MANUAL。

下面就要真正用到IPQM变量了。
激活电机 Ix00=1
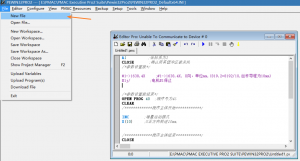
激活电机1,则在终端Termianl输入I100=1回车。从官网手册:SOFTWARE REFERENCE MANUAL,即软件参考手册中,我们看到 Ix00变量的定义。

屏蔽报警
因为没有设置限位开关, 所以关掉硬件位置限制, 同时, 你也不知道驱动器是高报警还是低报警,把驱动器报警也关掉。这些通过 Ix24 进行设置。
让电机动起来总代码:
对电机1操作, 逐行在终端Termianl输入以下命令
I100 ; 激活电机
I124=$120001 ; 取消限位
I122=30 ; 设置速度
#1J+ ; JOG命令,电机1正转
或者我们可以打开Configure I变量配置面板,在里面直接改变量值。








![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)





暂无评论内容