
驱动一个电机,需要电机驱动器和Pmac配置的配合,重点在于配置I变量。
1. 指南资料
官方手册:使用说明书(综合篇)AC伺服电机·驱动器MINAS A5 Ⅱ /A5系列
2. 硬件配置
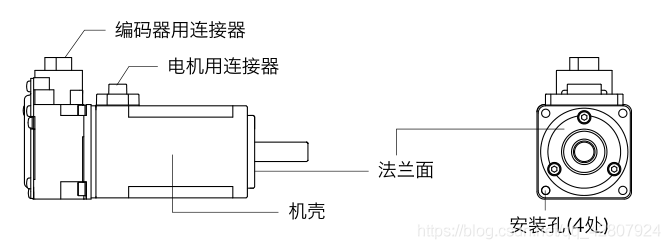
- 松下A5家族 MSMD033G1U 低惯量增量编码AC伺服电机 额定转速 3000 r/min
- 松下 MBDHT2510 AC伺服电机·驱动器,为B型。




3. 连线,位置控制模式


4. 驱动器参数设置
驱动器具有设定其特性、功能等的各种参数。所有首先要对参数进行设置,参数可以通过以下两种方法进行参照及设定。
- 主机前面板
- 安装调试软件「PANATERM」与电脑连接
控制模式有 P位置控制、S速度控制、T转矩控制、F全闭环控制。
5. 位置控制
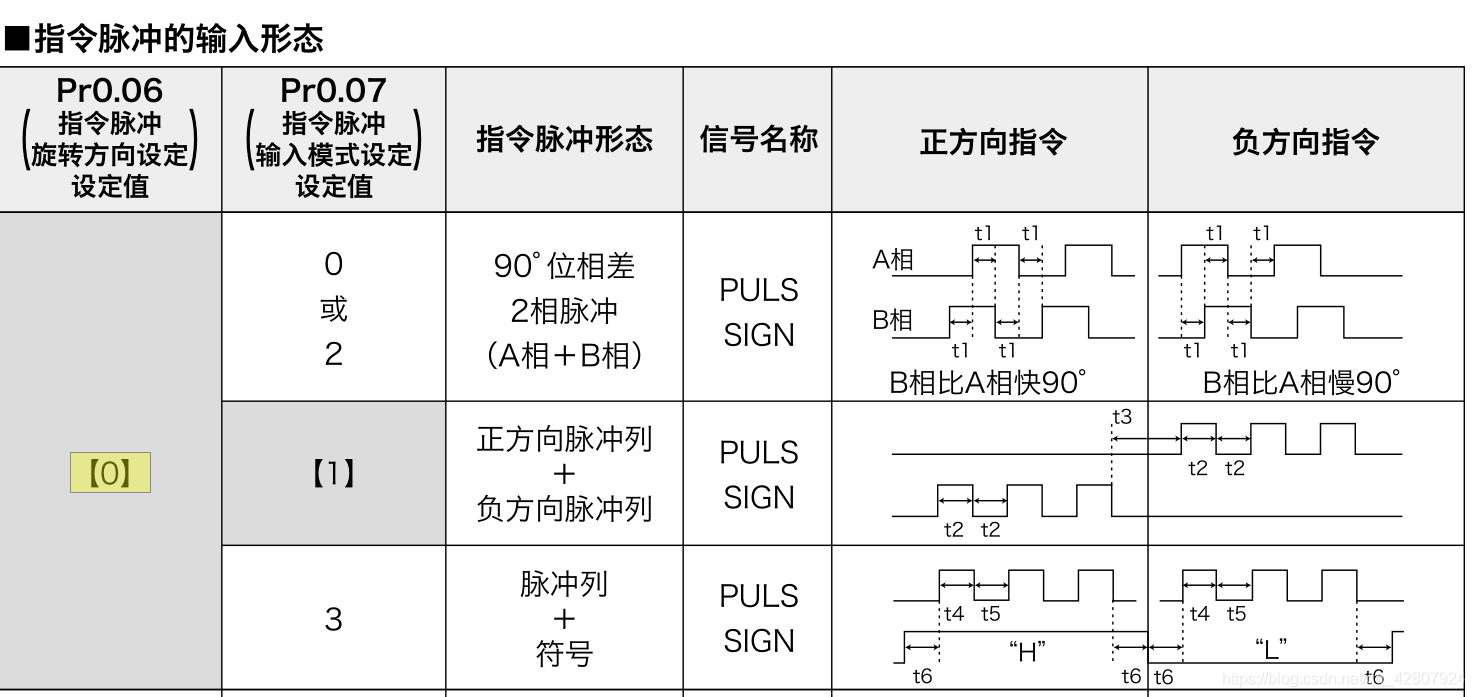
我们选择位置控制模式。位置指令(脉冲列)对应有以下三种形态的输入。通过参数 Pr0.07设定,范围0-3。本机为: Pr0.07= 3
- 二相脉冲
- 正方向脉冲/负方向脉冲
- 脉冲列+符号

6.电子齿轮功能
可将PMAC卡发过来的脉冲序列倍增,通过以下参数配置,本机为:Pr0.08=16384,Pr0.09=0,Pr0.10=1000,即本机转一圈需要16384个脉冲。

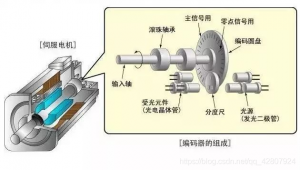
- 编码器为ABZ相增量式,工作模式,按照手册设定完成之后,试运转步骤。


如果电机能动之后,我们要进行增益调整。对从上位控制器发出的指令,驱动器需要尽可能的让电机忠实的按照指令且没有延迟地进行工作。为了让电机动作更加接近指令,最大限度发挥,就需要进行增益调整。
7.增益调整
也可自动调整。自由度控制模式可通过独立设定指令响应和伺服刚性,改善响应性是位置和速度控制的扩展功能。
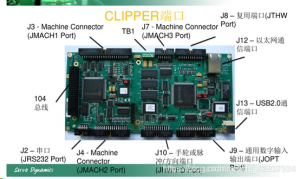
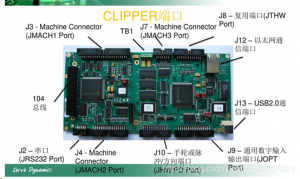
PMAC卡配置
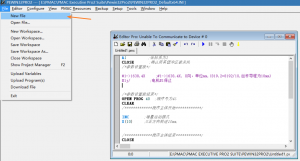
如图,使用Setup程序进行I变量的引导式配置,以下为每一步的截图及I变量记录。



I7000=6527
I7001=0
I7002=3
I10=3713991

I101=1
I100=1

I7016=3
I102=$78002

I125=$78000
I124=$120001



Motor commutation by PMAC-TURBO requires an ongoing commutation feedback. This is normally done through the motor’s incremental encoder.
Please select the encoder channel to be used. Also, please choose either x4, x2 or x1 quadrature decode. If you see ‘Positive Direction’ selection on the screen (for P1-type PMAC), please specifiy CCW direction gets positive count or CW direction gets positive count.Note that x4 quadrature decode is the default and is most commonly used.
PMAC-Turbo的电机换向需要一个持续的换向反馈。这通常是通过电机的增量式编码器完成的。
请选择要使用的编码器通道。另外,请选择x4、x2或x1正交解码。如果在屏幕上看到“正方向”选择(对于P1型PMAC),请指定ccw direction获取正计数或cw direction获取正计数。请注意,x4正交解码是默认值,最常用。
I183=$78001
I7010=7
出现故障。

上述所有变量汇总
I7000=6527
I7001=0
I7002=3
I10=3713991
I101=1
I100=1
I7016=3
I102=$78002
I125=$78000
I124=$120001
I183=$78001
I7010=7
由于编码器没有工作,不可抗力故障,无法继续通过Setup程序配置I变量,但是我们可以从例程中拿过来和这个组合一下。
//2号伺服电机
I7000=6527 // 伺服IC 0最大相位/PWM频率控制(仅限PMAC2)
I7001=0
I7002=3
I10=3713991
I7026=3
I7020=7
i905=7//编码器方向译码
i906=0
i907=1
i908=0
I225=$3C000//标志
I224=$120001
i200=1//
i201=1//需要换向
i202=1//需要换向
I203=1825//位置环反馈地址
I204=1825//一个编码器,速度环
I225=$3C000//标志
I224=$120001
i269=32767//放大器
1号伺服电机
//2号伺服电机
I7000=6527 // 伺服IC 0最大相位/PWM频率控制(仅限PMAC2)
I7001=0
I7002=3
I10=3713991
I7016=3
I7010=7
I900=7 //编码器逆时针X4方向译码
I901=0 //数字滤波使能开
I902=1
I903=0
I100=1//激活
I101=1//需要换向
I102=C003//指令输出地址DAC1
I103=$0720//位置环反馈地址
I104=$0720//速度环,因只有一个编码器,故相同
I124=$120001
I125=$3C000//标志
i169=32767//放大器
1号伺服电机不需要换向
//1号伺服电机
I7000=6527 // 伺服IC 0最大相位/PWM频率控制(仅限PMAC2)
I7001=0
I7002=3
I10=3713991
I7016=3
I7010=7
I900=7 //编码器逆时针X4方向译码
I901=0 //数字滤波使能开
I902=1
I903=0
I100=1//激活
I101=0//不需要换向
I102=C003//指令输出地址DAC1 默认
I103=$0720//位置环反馈地址
I104=$0720//速度环,因只有一个编码器,故相同
I122=20//JOG速度
I124=$120001 //清除限位
//I125=$3C000//超行程限制开关、home标志、放大器故障标志、放大器启用输出和索引通道。
I125=$02C000// 低报警,
I169=32767//放大器

$$$ ————全局重置:包括所有电机和坐标,系统
$$***———— 重置并重新初始化整个卡
save———将i变量保存到eeprom中
<ctrl-a>——中止所有运动程序和移动
<ctrl-k>——所有电机的终止输出
Global I-Variables
I0 PMAC2卡号
I1 串行端口通信模式
I2 控制面板禁用
I3 I/O握手模式
I4 通信校验和启用
I5 PLC程序开/关
i6 错误报告模式
I7 就位循环次数
I8 实时中断周期
I9 完整/简化程序列表表
I10 伺服中断时间
I11 编程移动计算时间
I12 点动到位置计算时间
I13 程序化移动分割时间
I14 运行时自动位置匹配
I15 度/弧度控制,用于用户trig func-选项
I16 点旋转缓冲器请求
I17 旋转缓冲器请求关闭点
I18 固定缓冲器满报警点
I19 数据采集周期(伺服循环)
I20 数据采集选择页面
I21--I44 数据采集源1--24地址
I45 数据采集缓冲区位置和模式
I47 指向<ctrl-w>命令的指针地址
I48 DPRAM伺服数据启用
I49 DPRAM后台数据启用
I50 快速移动速度模式
I51 引线螺钉补偿启用
I52 程序保持转换率
I53 程序步进模式控制
I54 PMAC2串行波特率
I55 DPRAM后台缓冲控制
I56 DPRAM ASCII通信中断启用
I57 DPRAM二进制旋转缓冲器启用
I58 DPRAM ASCII通信启用
I59 DPRAM缓冲器最大电机/C.S.编号
I60 自动转换的ADC寄存器地址
I61 自动转换的ADC寄存器数
i62 内部消息传送带返回控制
I8x 电机x第三分解器齿轮比
I89 刀具补偿外角度断点
I9x 电机x第二分解器齿轮比
I99 齿隙滞后
I*30 : 伺服环的比例增益,影响系统的刚性。
I*31 : 伺服环的微分增益,提供给系统阻尼。
I*32 : 伺服环的速度前馈增益,减小系统的跟随误差。
I*33 : 伺服环的积分增益,减小系统的稳态误差。
I*35 : 伺服环的加速度前馈, 消除系统在加减速时的跟随误差。
I*68 : 摩擦增益,减小由于摩擦产生的跟随误差。


![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)





暂无评论内容