
文章目录
一、 概述
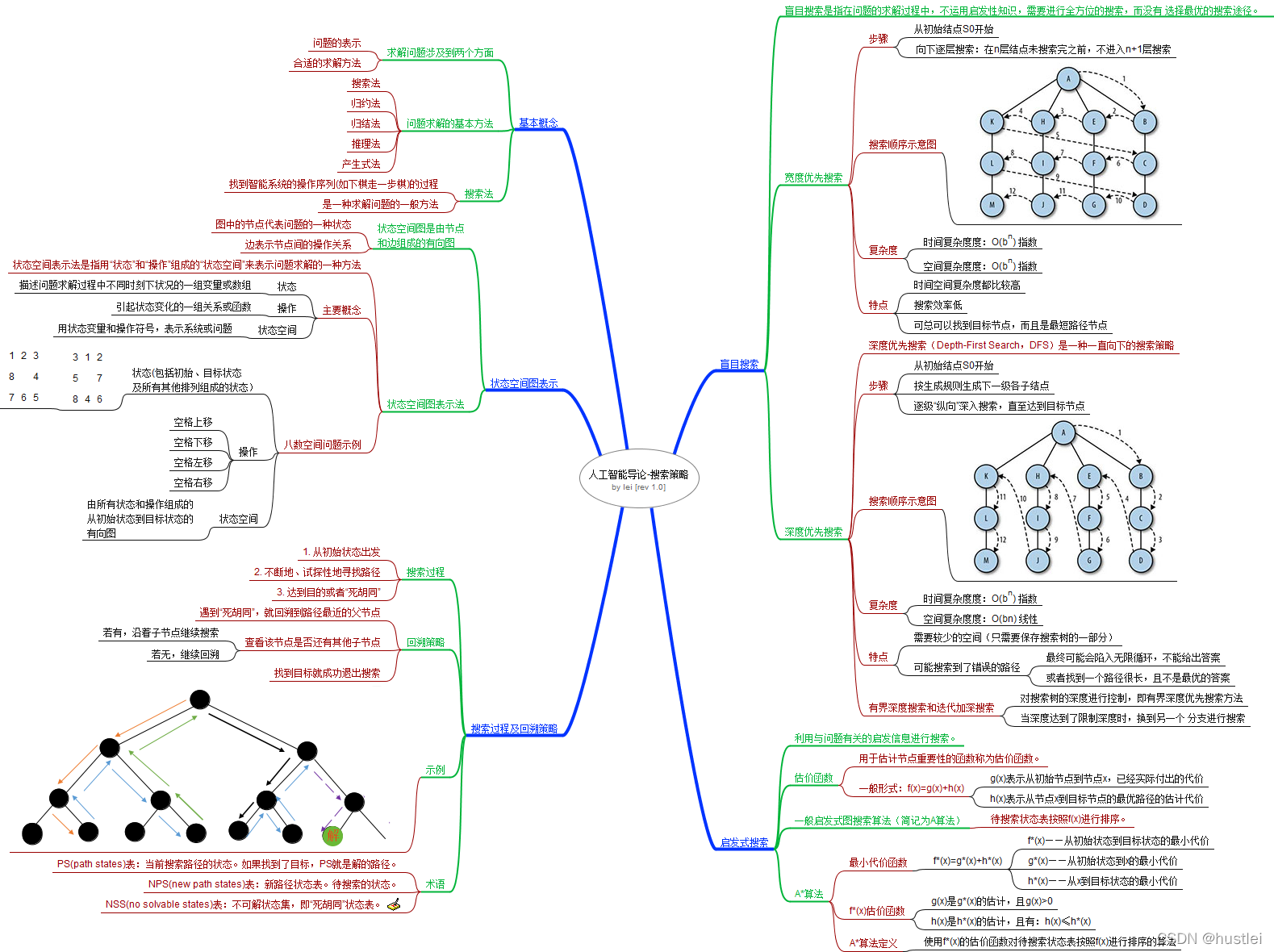
人工智能经典三大基本技术为:知识表示、推理、搜索策略。
其中搜索直接关系到智能系统的性能与运行效率,搜索技术渗透在各种人工智能系统中。专家系统、自然语言理解、自动程序设计、模式识别、机器学习、信息检索和博弈等领域都广泛使用搜索技术。
为方便记忆和回顾,根据个人学习,总结人工智能基础知识和思维导图形成系列。
二、 重点内容
- 基本概念
- 状态空间图表示方法
- 盲目搜索
- 启发式搜索
三、 思维导图

四、 重点知识笔记
1. 概述
1.1 基本概念
求解一个问题时,涉及到两个方面:
- 问题的表示
- 选择一个相对合适的求解方法
问题求解的基本方法:
- 搜索法
- 归约法
- 归结法
- 推理法
- 产生式
搜索就是找到智能系统的操作序列(如下棋走一步棋)的过程,是一种求解问题的一般方法。
1.2 状态空间图表示
概念
人工智能中把描述问题的有向图称为状态空间图,简称状态图。
- 状态图中的结点代表问题的一种格局,一般称为问题的一个状态;
- 边表示两结点之间操作关系
状态2
↗
操作1
╱
状态1——操作2——>状态3
╲
操作3
↘
状态4
状态空间表示法
状态空间表示法是指用“状态”和“操作”组成的“状态空间”来表示问题求解的一种方法。
(1)状态state
描述问题求解过程中不同时刻下状况的一组变量或数组。
S=[s1, s2, ...]
例如:三个硬币的正反面状态
- 状态1:
[正,正,正] - 状态2:
[正,正,反] - 状态3:
[正,反,反] - 等共8种状态
(2)操作operator
操作表示引起状态变化的一组关系或函数。
例如:上述示例中的,给某个硬币翻面。
(3)状态空间state space
用状态变量和操作符号,表示系统或问题。
示例:八数空间问题
初始状态:
3
1
2
5
7
8
4
6
\\color{#888} \\begin{array}{|c|c|c|} \\hline 3 & 1 & 2 \\\\ \\hline 5 & & 7 \\\\ \\hline 8 & 4 & 6 \\\\ \\hline \\end{array}
35814276
目标状态:
1
2
3
8
4
7
6
5
\\color{#888} \\begin{array}{|c|c|c|} \\hline 1 & 2 & 3 \\\\ \\hline 8 & & 4 \\\\ \\hline 7 & 6 & 5 \\\\ \\hline \\end{array}
18726345
状态集:数字在表格中的所有排法。
操作算子:空格上移、空格左移、空格下移、空格右移。
2. 搜索过程及回溯策略
搜索过程
- 从初始状态出发
- 不断地、试探性地寻找路径
- 达到目的或者“死胡同”
回溯策略
- 遇到“死胡同”,就回溯到路径最近的父节点
- 查看该节点是否还有其他子节点
- 若有,沿着子节点继续搜索
- 若无,继续回溯
- 找到目标就成功退出搜索

回溯搜索算法的术语说明
- PS(path states)表:当前搜索路径的状态。如果找到了目标,PS就是解的路径。
- NPS(new path states)表:新路径状态表。待搜索的状态。
- NSS(no solvable states)表:不可解状态集,即“死胡同”状态表。记录无解的路径,遇到路径上的状态就立即排除。
3. 盲目搜索
盲目搜索是指在问题的求解过程中,不运用启发性知识,需要进行全方位的搜索,而没有选择最优的搜索途径。这种搜索具有盲目性,效率较低,容易出现“组合爆炸”问题。
典型的盲目搜索有深度优先搜索和广度优先搜索。
3.1 宽度优先搜索
宽度优先搜索(Breadth-First Search,BFS)又称为广度优先搜索。
宽度优先搜索是指:
- 从初始结点S0开始
- 向下逐层搜索:在n层结点未搜索完之前,不进入n+1层搜索
搜索路径示意图如下:

宽度优先搜索的复杂度
- 时间复杂度度:O(bn) 指数
- 空间复杂度度:O(bn) 最坏为指数
宽度优先搜索特点
- 时间空间复杂度都比较高
- 搜索效率低
- 可总可以找到目标节点,而且是最短路径节点
3.1 深度优先搜索
深度优先搜索(Depth-First Search,DFS)是一种一直向下的搜索策略:
- 从初始结点S0开始
- 按生成规则生成下一级各子结点
- 逐级“纵向”深入搜索,直至达到目标节点
搜索路径示意图如下:

深度优先搜索的复杂度
- 时间复杂度度:O(bn) 指数
- 空间复杂度度:O(bn) 线性
深度优先搜索特点
- 需要较少的空间(只需要保存搜索树的一部分)
- 可能搜索到了错误的路径(有些问题具有无限的搜索树,可能无法返回正确的路径)
- 最终可能会陷入无限循环,不能给出答案
- 或者找到一个路径很长,且不是最优的答案
有界深度搜索和迭代加深搜索
对于深度比较大的情况,深度优先可能搜索需要很长的运行时间,而且可能得不到解答。一种比较好的问题求解方法是对搜索树的深度进行控制,即有界深度优先搜索方法。
深度优先搜索过程总体上按深度优先算法进行,但对搜索深度需要给出一个深度限制。当深度达到了限制深度时,如果还没有找到解答,就停止对该分支的搜索,换到另一个分支进行搜索。
4. 启发式搜索
利用与问题有关的启发信息进行搜索。
在搜索过程中,关键的一步是如何确定下一个要考察的节点,确定方法不同就形成了不同的搜索策略。如果在确定节点时能利用问题的启发信息,估计出节点的重要性,就可以在搜索时选择重要性高的节点。
估价函数
用于估计节点重要性的函数称为估价函数。其一般形式为:
f
(
x
)
=
g
(
x
)
+
h
(
x
)
f(x)=g(x)+h(x)
f(x)=g(x)+h(x)
-
g
(
x
)
g(x)
g(x)表示从初始节点到节点x,已经实际付出的代价 -
h
(
x
)
h(x)
h(x)表示从节点x到目标节点的最优路径的估计代价
八数码问题的多种估价函数
- 最简单的估价函数:与目标相比,位置不符合的数字数量。
- 较好的估价函数:各数字移动到目的位置所需移动距离的总和。
- 第三种估价函数:对每一对逆转数字乘以一个倍数。
- 第四种估价函数:将位置不符合的数字数目总和与3倍逆转数目相加。
一般启发式图搜索算法(简记为A算法)
待搜索状态表按照f(x)进行排序。
A*算法
- 最小代价函数:f*(x)=g*(x)+h*(x)
- f*(x)——从初始状态到目标状态的最小代价
- g*(x)——从初始状态到x的最小代价
- h*(x)——从x到目标状态的最小代价
- 估价函数f(x)=g(x)+h(x)如果满足以下条件,称为f*(x)的估价函数
- g(x)是g*(x)的估计,且g(x)>0
- h(x)是h*(x)的估计,且有:h(x)≤h*(x)
使用f*(x)的估价函数对待搜索状态表按照f(x)进行排序的算法,称为A*算法。
在A*算法中:
- g(x)笔记容易得到,随着更多搜索信息的获得,g(x)的值呈下降趋势
- h(x)的确定依赖于具体问题领域的启发性信息,其中h(x)≤h*(x)的限制十分重要,它可以保证A*算法都能找到最优解。
个人总结,部分内容进行了简单的处理和归纳,如有谬误,希望大家指出,持续修订更新中。






![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)







暂无评论内容