———————————————————————————————————————
第七讲 求解Ax=0:主变量、特解
本课时将讲解如何计算那些向量空间中的向量,从概念定义转向算法,求解Ax=0的算法是怎样的,即零空间。
一、AX = 0的求解
对于AX = 0的求解过程,我们通过例子一一展示。下面设A矩阵为:
接下来我们对A矩阵进行消元,由于对于矩阵A 进行“行操作”并不会改变Ax=b 的解,因此也不会改变零空间(但是会改变列空间)。
消元得到:
U(echelon form 阶梯式)。此时,根据课中教授定义。矩阵的rank(我们称之为秩)为消元中主元的个数(用r表示)。相对于非主元我们称之为free variables(自由变元)的个数为n-r(n为变量的个数)。
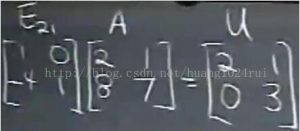
当我们将系数矩阵变换为上三角阵U 时,就可以用回代求得方程Ux=0 的解。
自由变元的取值可以为随意值,当我们为其设定后,我们便可以求出对应的特解。例如为了计算方便我们将分别设为(1,0)和(0,1),即令
x2
=1,而
x4
=0 和
x2
=0 而
x4
=1。那么就可以求出如下两个特解。
![图片[4]-MIT 线性代数(7—9)读书笔记-卡核](//www.caxkernel.com/wp-content/uploads/2022/12/20221211130044-6395d47c60b2d.png) 即
即 ![图片[4]-MIT 线性代数(7—9)读书笔记-卡核](//www.caxkernel.com/wp-content/uploads/2022/12/20221211130044-6395d47ca4675.png) (c、d是变量)
(c、d是变量)
矩阵A 的零空间就是这些“特解”向量的线性组合所构成的向量空间,
x= c[−2,1,0,0]T+d[2,0,−2,1]T
。自由列的数目等于n-r,这是特解的数目和零空间的维数。
算法整理:消元后矩阵U的秩Rank(A)=r,表示主变量的个数,主元的个数,表示只有r个方程起作用,那么自由变量的个数即n-r个(对于矩阵m×n,n列对应n个未知数),令自由变量取1,0值就能得到特解,所有的特解构成了零空间的基,特解的线性组合即构成了整个零空间。
二、行最简形式
2.1 简化的行阶梯形式R
R=简化行阶梯形式reduced row echelon form(rref):主元上下都是0,主元变为1
全为0的行三是如何得来的,因为这一行是其他行的线性组合,消元会把它剃除。
继续消元,我们可以把主元上方位置变为0
![图片[5]-MIT 线性代数(7—9)读书笔记-卡核](//www.caxkernel.com/wp-content/uploads/2022/12/20221211130044-6395d47cd587d.png)
(RREF)
它以最简的形式包含了所有信息:
1)主行(行一,行二);
2)主列(列一,列三),自由列,主元;
3)一个单位阵,主元上下均为0,而且主元为1,单位阵位于主列和主行的交汇处。以上是一个2×2的单位阵;
4)一个全为0的行,全为0的行总表示,该行的原行是其他行的线性组合;
5)从Ax=0变为Ux=0再变为Rx=0的解,解更明了
通过“列交换”,可以将矩阵R 中的主元列集中在左侧,从而在左上角形成这个单位阵。如果矩阵A 中的某些行是线性相关的,则在矩阵R 的下半部分就会出现一些完全为0的行向量。F即自由列消元后组成的部分。
此时,我们对由A变化而来的R如下表示的设定:
那么矩阵R可以表示为:
2.2 通过Rx=0得到Ax=0的零向量空间
原方程Ax=0 变为Ux=0,又变为求解Rx=0。
为了简化,可以写成:
回代得
xpivot=−Fxfree
,如果令
xfree=I
,则
xpivot=−F
。所以零空间矩阵N最终形式为
其Ax=0的解为:x=cN(常数c)。
此时要注意如果在变换出R 左上角的单位阵的过程中采用了列交换,则最后的解要完成逆变换。在本例中,R进行了第二列和第三列交换才形成
[IF]
,所以零空间N=
[−FI]
,需要进行第二行和第三行交换,才能得到解
⎡⎣⎢⎢⎢−210020−21⎤⎦⎥⎥⎥
。
×××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××
总结:
1. Ax=0 在空间上的表示,以及次方程变成Ux=0的时候的求解其零空间的方法;
2. Ax=0变成Ux=0时,此时Ax=0零空间的求解方法零空间N=[ I F ]。
—————————————————————————————————————————————————————
第八讲 求解Ax=b:可解性和解的结构
1. 方程组 Ax=b
首先,继续上次课的例子:
通过以上推导可以看到,如果方程组有解,必须满足b_3=b_1+b_2。消元告诉我们,这是必须的。换句话说,左侧行的线性组合得到0,那么右侧常量线性组合也比为0。
2、方程组Ax=b的可解性
从上面的例子可以看出Ax=b可解性Solvability(有解时右侧向量b 须满足的条件):
1)有解,仅当b 属于A 的列空间时成立,即,b 必须是A 的各列的线性组合;
2)行的线性组合如果得到零行,那么b 中元素的同样组合必然也是零。
这两种描述是等价的!他们同样是描述方程组有解的条件。
3.Ax=b解的结构
从开头的例子可以看出,当Ax=b有解时,我们可以求出其解,其解的结构通常可以分为两部分:
3.1 特解
对方称的增广矩阵的消元变化,我们可以得到方程组的主元和自由变元,当我们将所有的自由变元置0,并且利用自由变元求出主元,我们即可获得方程组的一个特解(因为我们对自由变元设定了值,所以我们称之为特定的解)。记为x_p。
3.2通解(Null Space)
我们求解方程组Ax = b所对应的方程组Ax = 0的解,即A的Nul lSpace(A的零空间)。记为x_n。
因此,x_p + x_n为方程组的解。(此解与Ax = b的解不在于同一个空间中)
如在上面的例子中,其解是:
想象一下,x_p 是一个非原点的点,x_n 是一个穿过原点的平面,那么x_p+x_n 是两者的组合,是一个不经过原点的经过x_p 的二维平面,注意它不是子空间。
3.3 秩r与Ax = b的解的关系
对于一个m×n的矩阵A,他的秩r存在关系:r<=m,r<=n
3.3.1. 列满秩,各列线性无关,即r=n:
每一列都有主元,0 个自由变量,此时零空间N(A)只有零向量,因为没有自由变量能够赋值,列的线性组合无法产生0 列(回顾下第六课时和第三课时,其中3 中讲到:如果存在非0 向量x,使的Ax=0,即x对A 的列向量的线性组合可以得到0 向量(有一列在线性组合中不起作用),那么A 是不可逆的。)。Ax=b 的全部解:0 个或唯一解,如果有解,即是唯一解特解x_p。
此处没有要求n与m之间的关系,有下面的例子所示:上面的A通过消元变成行最简阶梯式,很容易看出来A 的两列线性无关,所以R 中两个主元。同时我也一眼能看出来有两个行是多余的,肯定R 下面会有两个0 行,因为行向量是2 维的,因为前两行是线性无关的,2 维平面中有两个向量线性无关,那该平面的所有向量都可以由这两个向量线性组合得到,所有会出现两个0 行。
3.3.2、r=n=m
此时,对于任意的b一定存在一个解与之对应。因为A是可逆的方阵。它的列所组成的空间能表示任意个同维度量。要想Ax=b有解,b必须在A的列空间中。
3.3.3、行满秩,即 r = m < n
此时对于任意的b都有解,它的解有无穷多个。因为存在自由变元n-r个。
3.3.4、r<m,r<n
这种情况为一般情况,它可能无解,也可能有无穷多个解。
4. 总结
总结:矩阵A 为m×n 的矩阵,Ax=b 的解的情况
r=m=n R=I 有唯一解b 是A 列向量的线性组合
r=n<m 有0 解(无解)或唯一解b 如果恰好是A 的列的线性组合则有唯一解
r=m<n 有无穷个解特解+零空间
r<m,r<n 有0 解或无穷解如果b 的行和A 的行向量之间有相同的组合关系,那有无穷解,否
则有0 解
——————————————————————————————————————————————————————————————————————————————————————————————
第九讲 线性相关性、基、维数
学习什么是”线性相关性“,“线性无关”,什么是由向量组所“生成”的空间,什么是向量空间的“基”,什么是子空间的“维数”。
由上一讲可知:Ax=b,A为m×n,其中m<n,则Ax=0存在非0解,因为A消元后存在自由列。
1.向量组线性相关性
线性无关的定义:若
c1x1+c2x2+……+cnxn=0仅在c1=c2=……=cn=0
时才成立,则称向量
x1,x2……xn
是线性无关的。若这些向量作为列向量构成矩阵A,则方程Ax=0 只有零解x=0。 反之,则称为线性相关。
对于矩阵中个列的线性相关性,如果零空间N(A)里存在非零向量,那么各列相关。
例如:假设二维空间中,任意三个不共线的向量必是线性相关的,因为由上面的背景知识可知,这三个向量组成
的矩阵A 是m<n 的。
2.向量组“张成”的空间
在第五讲中叙述了向量空间的基本定义。而“张成”的定义则可这样认为:
当一个空间是由向量
v1,v2……vk
的所有线性组合组成时,我们称这些向量张成了这个空间。如果向量
v1,v2……vk
张成空间S,则S 是包含这些向量组合的最小空间。
3.基与维数
从上面2的“张成”的概念中可以得出基的概念,它包含向量的个数不多不少,向量空间的一组基是指:一系列的向量,v1,v2…vd,这些向量具有两大性质:1)他们是线性无关的,可逆;2)他们生成整个空间。
比如:三维空间中,单位阵是最明显的一个基,除此之外,还有很多其他的基,比如向量[1,1,2],[2,2,5]是生
成二维平面的一组基,再加上一个向量[3,4,8]就是三维空间的一组基。
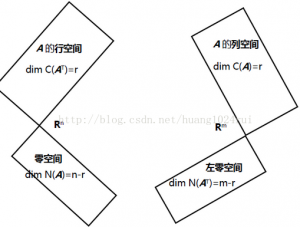
这些基有一个共同的特点,即对于给定N 维空间,那么基向量的个数就是N 个(即不管是3 维空间,列空间,还是零空间,空间中任意基都满足:基向量的个数相等)。
维数,即基向量的个数,空间的大小(维数)。


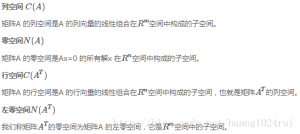
![图片[1]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130043-6395d47bb7711.png)
![图片[2]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130043-6395d47bed77d.png)
![图片[3]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130044-6395d47c2880d.png)
![图片[4]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130044-6395d47c60b2d.png) 即
即 ![图片[4]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130044-6395d47ca4675.png) (c、d是变量)
(c、d是变量)![图片[5]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130044-6395d47cd587d.png) (RREF)
(RREF)![图片[6]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130045-6395d47d5ba7c.png)
![图片[7]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130045-6395d47da81d5.png)
![图片[8]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130046-6395d47e2c437.png)
![图片[8]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130046-6395d47e8a8d0.png)
![图片[9]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130047-6395d47f1d6ac.png)
![图片[10]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130047-6395d47f39705.png)
![图片[11]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130047-6395d47f9cf42.png)
![图片[12]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130047-6395d47fec29d.png)
![图片[13]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130048-6395d48072d0c.png)
![图片[14]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130049-6395d48111180.png)
![图片[14]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130049-6395d481cf0bc.png)
![图片[14]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130050-6395d4828ae47.png)
![图片[14]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130051-6395d483419f0.png)
![图片[15]-MIT 线性代数(7—9)读书笔记-卡核](http://www.caxkernel.com/wp-content/uploads/2022/12/20221211130051-6395d483d43a6.png)
![图片[16]-MIT 线性代数(7—9)读书笔记-卡核](wp-content/uploads/2022/12/20170401105803055.png)
![图片[17]-MIT 线性代数(7—9)读书笔记-卡核](wp-content/uploads/2022/12/20170401111323978.png)



![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)