
第二十八讲:正定矩阵和最小值
本讲学习正定矩阵positive definite matrices,这个主题把整门课的知识融为一体,主元,行列式,特征值,不稳定性,新表达式
xTAx
x^TAx。目标是:
怎么判断一个矩阵是否是正定矩阵
\\color{red}{怎么判断一个矩阵是否是正定矩阵},为什么对正定矩阵感兴趣,最后给出几何上的解释,椭圆和正定性有关,双曲线与正定性无关。当极小值存在时,如何找出极小值应用。
本讲涉及的矩阵均为实对称矩阵。
\\color{red}{本讲涉及的矩阵均为实对称矩阵。}
1.正定矩阵
1.1正定性的判断
正定矩阵判定方法
\\color{red}{正定矩阵判定方法}:
1)特征值方法:
λi>0
λ_i>0;2)行列式方法:所有顺序主子阵(leading principal submatrix)的行列式(即顺序主子式,leading principal minor)大于零;
3)主元方法:矩阵消元后主元均大于零;
4)新方法:
xTAx>0
x^TAx>0,x
x 是任意向量,除零向量外。
大多数情况下使用4)来定义正定性,而用前三条来验证正定性。
我们仍然从二阶说起,有矩阵A=[abbd]A=\\begin{bmatrix}a& b\\\\b& d\\end{bmatrix},判断其正定性有以下方法:
1.矩阵的所有特征值大于零则矩阵正定:
λ1>0,λ2>0
\\lambda_1>0,\\lambda_2>0;
2.矩阵的所有顺序主子阵(leading principal submatrix)的行列式(即顺序主子式,leading principal minor)大于零则矩阵正定:
a>0, ac−b2>0
a>0,\\ ac-b^2>0;
3.矩阵消元后主元均大于零:
a>0, ac−b2a>0
a>0,\\ \\frac{ac-b^2}{a}>0;
4.
xTAx>0
x^TAx>0;
大多数情况下使用4来定义正定性,而用前三条来验证正定性。
1.2 最小值的判定及其几何意义
双曲线、抛物线、椭圆之间的联系与区别:
联系:它们都属于圆锥曲线;
区别:根本的差别在于它们的离心率e不同,抛物线的离心率e=1为常数,双曲线的离心率e>1,椭圆的离心率0<e<1。
e=a2+b2−−−−−−√
e=\\sqrt{a^2+b^2},a是长轴的长度,b是短轴的长度。
例如:
来计算一个例子:
A=[266?]
A=\\begin{bmatrix}2& 6\\\\6& ?\\end{bmatrix},在
?
?处填入多少才能使矩阵正定?
- 1)来试试1818,此时矩阵为
A=[26618]
A=\\begin{bmatrix}2& 6\\\\6& 18\\end{bmatrix},detA=0
\\det A=0,此时的矩阵成为半正定矩阵(positive semi-definite)。矩阵奇异,其中一个特征值必为0
0,从迹得知另一个特征值为2020。矩阵的主元只有一个,为2
2。
计算xTAxx^TAx,得
[x1x2][26618][x1x2]=2x21+12x1x2+18x22
\\begin{bmatrix}x_1& x_2\\end{bmatrix}\\begin{bmatrix}2& 6\\\\6& 18\\end{bmatrix}\\begin{bmatrix}x_1\\\\x_2\\end{bmatrix}=2x_1^2+12x_1x_2+18x_2^2
这样我们得到了一个关于x1,x2
x_1,x_2的函数f(x1,x2)=2x21+12x1x2+18x22
f(x_1,x_2)=2x_1^2+12x_1x_2+18x_2^2,这个函数不再是线性的,在本例中这是一个纯二次型(quadratic)函数,它没有线性部分、一次部分或更高次部分(Ax
Ax是线性的,但引入xT
x^T后就成为了二次型)。
当?取18时,判定1、2、3都是“刚好不及格”
\\color{red}{“刚好不及格”}。
半正定矩阵:不是正定矩阵,是对称的,是成为正定矩阵的临界点,奇异矩阵,有一个特征值为0,其他特征值大于等于0。
\\color{red}{半正定矩阵:不是正定矩阵,是对称的,是成为正定矩阵的临界点,奇异矩阵,有一个特征值为0,其他特征 值大于等于0。}
- 2)我们可以先看“
一定不及格
\\color{red}{一定不及格}”的样子,令?=7
?=7,矩阵为A=[2667]
A=\\begin{bmatrix}2& 6\\\\6& 7\\end{bmatrix},二阶顺序主子式变为−22
-22,显然矩阵不是正定的,此时的函数为f(x1,x2)=2x21+12x1x2+7x22
f(x_1,x_2)=2x_1^2+12x_1x_2+7x_2^2,如果取x1=1,x2=−1
x_1=1,x_2=-1则有f(1,−1)=2−12+7<0
f(1,-1)=2-12+7<0。
几何意义: 如果我们把
z=2x2+12xy+7y2
z=2x^2+12xy+7y^2放在直角坐标系中,图像过原点
z(0,0)=0
z(0,0)=0,当
y=0
y=0或
x=0
x=0或
x=y
x=y时函数为开口向上的抛物线,所以函数图像在某些方向上是正值;而在某些方向上是负值,比如
x=−y
x=-y,所以函数图像是一个马鞍面(saddle),
(0,0,0)
(0,0,0)点称为鞍点(saddle point),它在某些方向上是极大值点,而在另一些方向上是极小值点。(实际上函数图像的最佳观测方向是沿着特征向量的方向。)
- 3)再来看一下“
一定及格
\\color{red}{一定及格}”的情形,令?=20
?=20,矩阵为A=[26620]
A=\\begin{bmatrix}2& 6\\\\6& 20\\end{bmatrix},行列式为detA=4
\\det A=4,迹为trace(A)=22
trace(A)=22,特征向量均大于零,矩阵可以通过测试。此时的函数为f(x1,x2)=2x21+12x1x2+20x22
f(x_1,x_2)=2x_1^2+12x_1x_2+20x_2^2,函数在除(0,0)
(0,0)外处处为正。
几何意义:我们来看看
z=2x2+12xy+20y2
z=2x^2+12xy+20y^2的图像,式子的平方项均非负,所以需要两个平方项之和大于中间项即可,该函数的图像为抛物面(paraboloid)。在
(0,0)
(0,0)点函数的一阶偏导数均为零,二阶偏导数均为正(马鞍面的一阶偏导数也为零,但二阶偏导数并不均为正,所以),函数在该点取极小值。
在微积分中,一元函数取极小值需要:
一阶导数为零且二阶导数为正
dudx=0,d2udx2>0
\\frac{\\mathrm{d}u}{\\mathrm{d}x}=0,
\\frac{\\mathrm{d}^2u}{\\mathrm{d}x^2}>0。在线性代数中我们遇到了了多元函数
f(x1,x2,⋯,xn)
f(x_1,x_2,\\cdots,x_n),要取极小值需要二阶偏导数矩阵为正定矩阵。
在本例中(即二阶情形),如果能用平方和的形式来表示函数,则很容易看出函数是否恒为正,
f(x,y)=2x2+12xy+20y2=2(x+3y)2+2y2
f(x,y)=2x^2+12xy+20y^2=2\\left(x+3y\\right)^2+2y^2。另外,如果是上面的
?=7
?=7的情形,则有
f(x,y)=2(x+3y)2−11y2
f(x,y)=2(x+3y)^2-11y^2,如果是
?=18
?=18的情形,则有
f(x,y)=2(x+3y)2
f(x,y)=2(x+3y)^2。
如果令
z=1
z=1,相当于使用
z=1
z=1平面截取该函数图像,将得到一个椭圆曲线。另外,如果在
?=7
?=7的马鞍面上截取曲线将得到一对双曲线。
再来看这个矩阵的消元,
[26620]=[1−301][2062]
\\begin{bmatrix}2& 6\\\\6& 20\\end{bmatrix}=\\begin{bmatrix}1& 0\\\\-3& 1\\end{bmatrix}\\begin{bmatrix}2& 6\\\\0& 2\\end{bmatrix},这就是
A=LU
A=LU,可以发现矩阵
L
L中的项与配平方中未知数的系数有关,而主元则与两个平方项外的系数有关,这也就是为什么正数主元得到正定矩阵。
上面又提到二阶导数矩阵,对于二元函数取极小值需要(与一元函数类似):
一阶偏导为0;
对于二阶导数,这个矩阵型为[fxxfyxfxyfyy]\\begin{bmatrix}f_{xx}& f_{xy}\\\\f_{yx}&f_{yy}\\end{bmatrix},显然,矩阵中的主对角线元素(纯二阶导数)必须为正,并且主对角线元素必须足够大来抵消混合导数的影响。同时还可以看出,因为二阶导数的求导次序并不影响结果,所以矩阵必须是对称的。
以此类推,现在我们就可以计算
n×n
n\\times
n阶矩阵了。
1.3 正定矩阵的拓展
接下来计算一个三阶矩阵,
A=⎡⎣⎢2−10−12−10−12⎤⎦⎥
A=\\begin{bmatrix}2& -1& 0\\\\-1& 2& -1\\\\0& -1& 2\\end{bmatrix},它是正定的吗?函数
xTAx
x^TAx是多少?函数在原点去最小值吗?图像是什么样的?
-
先来计算矩阵的顺序主子式,分别为
2,3,4
2,3,4;再来计算主元,分别为2,32,43
2,\\frac{3}{2},\\frac{4}{3};计算特征值,λ1=2−2√,λ2=2,λ3=2+2√
\\lambda_1=2-\\sqrt 2,\\lambda_2=2,\\lambda_3=2+\\sqrt 2。(正定) -
计算
xTAx=2x21+2x22+2x23−2x1x2−2x2x3
x^TAx=2x_1^2+2x_2^2+2x_3^2-2x_1x_2-2x_2x_3。 -
图像是四维的抛物面,当我们在
f(x1,x2,x3)=1
f(x_1,x_2,x_3)=1处截取该面,将得到一个椭圆体。得到的图形则是一个扁的橄榄球,有一个长轴,另外两个轴相等,类似于一个矩阵有一重复的特征值,另一个不同(3 个特征值)。如果是球的话,那就是单位矩阵,所有的特征值相同。
一般的情况下,三个特征值都不相同,它相当于有一个长轴,一个中轴,一个短轴,三个轴的方向就是特征向量的方向,轴的长度由特征值大小来决定。
\\color{red}{一般的情况下,三个特征值都不相同,它相当于有一个长轴,一个中轴,一个短轴,三个轴的方向就是特征向量的方向,轴的长度由特征值大小来决定。}我们将矩阵
A
A(对称矩阵)分解为A=QΛQTA=Q\\Lambda Q^T,可以发现上面说到的各种元素都可以表示在这个分解的矩阵中,我们称之为主轴定理
\\color{red}{主轴定理}(principal axis theorem),即特征向量说明主轴的方向、特征值说明主轴的长度。
A=QΛQT
A=Q\\Lambda Q^T是特征值相关章节中最重要的公式。
2. 本章总结
-
正定矩阵判定方法
\\color{red}{正定矩阵判定方法}:-
1)特征值方法:
λi>0
λ_i>0; -
2)行列式方法:所有顺序主子阵(leading principal submatrix)的行列式(即顺序主子式,leading principal minor)大于零;
-
3)主元方法:矩阵消元后主元均大于零;
-
4)新方法:
xTAx>0
x^TAx>0,x
x 是任意向量,除零向量外。
大多数情况下使用4)来定义正定性,而用前三条来验证正定性。
-
-
最小值的判定:一阶偏导为0;二阶偏导大于0。
- 主轴定理:
将矩阵AA(对称矩阵)分解为A=QΛQT
A=Q\\Lambda Q^T,可以发现上面说到的各种元素都可以表示在这个分解的矩阵中,我们称之为主轴定理
\\color{red}{主轴定理}(principal axis theorem),即特征向量说明主轴的方向、特征值说明主轴的长度。
第二十九讲:相似矩阵和若尔当形
在本讲的开始,先接着上一讲来继续说一说正定矩阵。
正定矩阵的逆矩阵有什么性质?
我们将正定矩阵分解为
A=SΛS−1
A=S\\Lambda
S^{-1},引入其逆矩阵A−1=SΛ−1S−1
A^{-1}=S\\Lambda^{-1}S^{-1},我们知道正定矩阵的特征值均为正值,所以其逆矩阵的特征值也必为正值(即原矩阵特征值的倒数)所以,正定矩阵的逆矩阵也是正定的。如果
A, B
A,\\ B均为正定矩阵,那么A+B
A+B呢?
我们可以从判定xT(A+B)x
x^T(A+B)x入手,根据条件有xTAx>0, xTBx>0
x^TAx>0,\\
x^TBx>0,将两式相加即得到xT(A+B)x>0
x^T(A+B)x>0。所以正定矩阵之和也是正定矩阵。再来看有
m×n
m\\times n矩阵A
A,则ATAA^TA(最早出现在最小二乘法)具有什么性质?
我们在投影部分经常使用ATA
A^TA,这个运算会得到一个对称矩阵,这个形式的运算用数字打比方就像是一个平方,用向量打比方就像是向量的长度平方,而对于矩阵,有ATA
A^TA正定:在式子两边分别乘向量及其转置得到xTATAx
x^TA^TAx,分组得到(Ax)T(Ax)
(Ax)^T(Ax),相当于得到了向量Ax
Ax的长度平方,则|Ax|2≥0
|Ax|^2\\geq0。要保证模不为零,则需要Ax
Ax的零空间中仅有零向量,即A
A的各列线性无关(rank(A)=nrank(A)=n)即可保证|Ax|2>0
|Ax|^2>0,ATA
A^TA正定。另外,在矩阵数值计算中,正定矩阵消元不需要进行“行交换”操作,也不必担心主元过小或为零,正定矩阵具有良好的计算性质。
接下来进入本讲的正题。
1. 相似矩阵
先列出定义:
矩阵
A, B
A,\\ B对于某矩阵M
M(可逆)满足B=M−1AMB=M^{-1}AM时,称A, B
A,\\ B互为相似矩阵。
1.对于在对角化一讲(第二十二讲)中学过的式子
S−1AS=Λ
S^{-1}AS=\\Lambda(
S
S是特征向量组成的矩阵),则有AA相似于
Λ
\\Lambda。
矩阵
A
A 的所有相似矩阵里面,ΛΛ是最好的,还有许多其他矩阵与A 相似。我们可以用任意的可逆矩阵M 代替S,都得到一个新的矩阵,这个新的矩阵与A 相似。那么A 与其他所有的相似矩阵的共同点是什么?
1.1两大性质
性质:1)相似矩阵具有相同的特征值;(注意特征向量并不相同)
\\color{red}{性质:1)相似矩阵具有相同的特征值;(注意特征向量并不相同)}
举个例子,
A=[2112]
A=\\begin{bmatrix}2& 1\\\\1& 2\\end{bmatrix},容易通过其特征值得到相应的对角矩阵
Λ=[3001]
\\Lambda=\\begin{bmatrix}3& 0\\\\0& 1\\end{bmatrix},取
M=[1041]
M=\\begin{bmatrix}1& 4\\\\0& 1\\end{bmatrix},则
B=M−1AM=[10−41][2112][1041]=[−21−156]
B=M^{-1}AM=\\begin{bmatrix}1& -4\\\\0& 1\\end{bmatrix}\\begin{bmatrix}2& 1\\\\1& 2\\end{bmatrix}\\begin{bmatrix}1& 4\\\\0& 1\\end{bmatrix}=\\begin{bmatrix}-2& -15\\\\1& 6\\end{bmatrix}。
我们来计算这几个矩阵的的特征值(利用迹与行列式的性质),
λΛ=3, 1
\\lambda_{\\Lambda}=3,\\ 1、
λA=3, 1
\\lambda_A=3,\\
1、
λB=3, 1
\\lambda_B=3,\\ 1。 所以,相似矩阵有相同的特征值。
继续上面的例子,特征值为
3, 1
3,\\
1的这一族矩阵都是相似矩阵,如
[3071]
\\begin{bmatrix}3& 7\\\\0& 1\\end{bmatrix}、
[1073]
\\begin{bmatrix}1& 7\\\\0& 3\\end{bmatrix},其中最特殊的就是
Λ
\\Lambda。
证明:
现在我们来证明这个性质,有
Ax=λx, B=M−1AM
Ax=\\lambda x,\\ B=M^{-1}AM,第一个式子化为
AMM−1x=λx
AMM^{-1}x=\\lambda
x,接着两边同时左乘
M−1
M^{-1}得
M−1AMM−1x=λM−1x
M^{-1}AMM^{-1}x=\\lambda
M^{-1}x,进行适当的分组得
(M−1AM)M−1x=λM−1x
\\left(M^{-1}AM\\right)M^{-1}x=\\lambda
M^{-1}x即
BM−1x=λM−1x
BM^{-1}x=\\lambda M^{-1}x。
BM−1=λM−1x
BM^{-1}=\\lambda
M^{-1}x可以解读成矩阵
B
B与向量M−1xM^{-1}x之积等于
λ
\\lambda与向量
M−1x
M^{-1}x之积,也就是
B
B的仍为λ\\lambda,而特征向量变为
M−1x
M^{-1}x。 以上就是我们得到的一族特征值为
3, 1
3,\\ 1的矩阵,它们具有相同的特征值。接下来看特征值重复时的情形。
性质:2)B=M−1AM,B的特征向量等于M的逆乘以矩阵A的特征向量;
\\color{red}{性质:2)B=M^{-1}AM, B 的特征向量等于M 的逆乘以矩阵A 的特征向量;}
1.2当矩阵A有重复的特征值
特征值重复可能会导致特征向量短缺,来看一个例子,设
λ1=λ2=4
\\lambda_1=\\lambda_2=4,写出具有这种特征值的矩阵中的两个
[4004]
\\begin{bmatrix}4& 0\\\\0& 4\\end{bmatrix},
[4014]
\\begin{bmatrix}4& 1\\\\0& 4\\end{bmatrix}。其实,具有这种特征值的矩阵可以分为两族:
-
第一族仅有一个矩阵
[4004]
\\begin{bmatrix}4& 0\\\\0& 4\\end{bmatrix},它只与自己相似(因为M−1[4004]M=4M−1IM=4I=[4004]
M^{-1}\\begin{bmatrix}4& 0\\\\0& 4\\end{bmatrix}M=4M^{-1}IM=4I=\\begin{bmatrix}4& 0\\\\0& 4\\end{bmatrix},所以无论M
M如何取值该对角矩阵都只与自己相似); -
另一族就是剩下的诸如[4014]\\begin{bmatrix}4& 1\\\\0& 4\\end{bmatrix}的矩阵,它们都是相似的。在这个“大家族”中,
[4014]
\\begin{bmatrix}4& 1\\\\0& 4\\end{bmatrix}是“最好”的一个矩阵(右上角为1),称为若尔当形
\\color{red}{若尔当形}。
若尔当形在过去是线性代数的核心知识,但现在不是了(现在是下一讲的奇异值分解),因为它并不容易计算。
- 继续上面的例子,我们在在出几个这一族的矩阵(若尔当认为它们并不是相似的,因为若尔当块大小不一样)
[4014], [5−113], [41704]
\\begin{bmatrix}4& 1\\\\0& 4\\end{bmatrix},\\
\\begin{bmatrix}5& 1\\\\-1& 3\\end{bmatrix},\\
\\begin{bmatrix}4& 0\\\\17& 4\\end{bmatrix},我们总是可以构造出一个满足trace(A)=8, detA=16
trace(A)=8,\\
\\det A=16的矩阵,这个矩阵总是在这一个“家族”中。
2.若尔当形
再来看一个更加“糟糕”的矩阵:
矩阵
⎡⎣⎢⎢⎢0000100001000000⎤⎦⎥⎥⎥
\\begin{bmatrix}0& 1& 0& 0\\\\0& 0& 1& 0\\\\0& 0& 0& 0\\\\0& 0& 0& 0\\end{bmatrix},其特征值为四个零。很明显矩阵的秩为
2
2,所以其零空间的维数为4−2=24-2=2,即该矩阵有两个特征向量。可以发现该矩阵在主对角线的上方有两个
1
1,在对角线上每增加一个11,特征向量个个数就减少一个。
令一个例子,
⎡⎣⎢⎢⎢0000100000000010⎤⎦⎥⎥⎥
\\begin{bmatrix}0& 1& 0& 0\\\\0& 0& 0& 0\\\\0& 0& 0& 1\\\\0& 0& 0& 0\\end{bmatrix},从特征向量的数目看来这两个矩阵是相似的,其实不然。
若尔当认为第一个矩阵是由一个
3×3
3\\times 3的块与一个
1×1
1\\times 1的块组成的
⎡⎣⎢⎢⎢⎢0000100001000000⎤⎦⎥⎥⎥⎥
\\left[\\begin{array}{ccc|c}0& 1& 0& 0\\\\0& 0& 1& 0\\\\0& 0& 0& 0\\\\\\hline0& 0& 0& 0\\end{array}\\right],而第二个矩阵是由两个
2×2
2\\times 2矩阵组成的
⎡⎣⎢⎢⎢⎢0000100000000010⎤⎦⎥⎥⎥⎥
\\left[\\begin{array}{cc|cc}0& 1& 0& 0\\\\0& 0& 0& 0\\\\\\hline0& 0& 0& 1\\\\0& 0& 0& 0\\end{array}\\right],这些分块被称为若尔当块。
若尔当块
\\color{red}{若尔当块}的定义型为:它只有一个重复的特征值,对角线上全是λi
λ_i,下面是0,上面是1,它的对角线上都是同一个数,只有一个特征向量。
Ji=⎡⎣⎢⎢⎢⎢⎢⎢⎢λi⋮1λi⋮1λi⋮⋯⋯⋯⋱λi⎤⎦⎥⎥⎥⎥⎥⎥⎥
J_i=\\begin{bmatrix}\\lambda_i& 1& & \\cdots& \\\\& \\lambda_i& 1&\\cdots& \\\\& & \\lambda_i& \\cdots& \\\\\\vdots& \\vdots& \\vdots& \\ddots& \\\\& & & & \\lambda_i\\end{bmatrix}
它的对角线上只为同一个数,仅有一个特征向量。
若尔当阵J
\\color{red}{若尔当阵J}:由若尔当块构成的矩阵,特征值位于对角线上,对角线上方有若干个1,若尔当块的数量等于特征向量的个数,因为每一块对应于一个特征向量。
J=⎡⎣⎢⎢⎢⎢⎢J1J2⋱Jd⎤⎦⎥⎥⎥⎥⎥
J=\\left[\\begin{array}{c|c|c|c}J_1& & & \\\\\\hline& J_2& & \\\\\\hline& & \\ddots& \\\\\\hline& & & J_d\\end{array}\\right]
若尔当定理
\\color{red}{若尔当定理}:每个方阵A
A 都相似于一个若尔当阵JJ。如果方阵A
A 有nn 个互不相同的特征值,那么它是一个可对角化的矩阵,对应的若尔当阵就是对角阵Λ,J=Λ,d=n
Λ,J=Λ,d=n。(若尔当块的个数即为矩阵特征值的个数。)
所以每一个矩阵
A
A都相似于一个若尔当矩阵,型为J=⎡⎣⎢⎢⎢⎢⎢J1J2⋱Jd⎤⎦⎥⎥⎥⎥⎥J=\\left[\\begin{array}{c|c|c|c}J_1& & & \\\\\\hline& J_2& & \\\\\\hline& & \\ddots& \\\\\\hline& & & J_d\\end{array}\\right]。注意,对角线上方还有
1
1。若尔当块的个数即为矩阵特征值的个数。
若尔当研究了所有情况,包含特征值重复的情况,此时特征向量的个数变少,这就是若尔当的理论。\\color{red}{若尔当研究了所有情况,包含特征值重复的情况,此时特征向量的个数变少,这就是若尔当的理论。}
3.本章总结
- 正定矩阵的性质(a)
A, B
A,\\ B均为正定矩阵,那么A+B
A+B和A−1
A^{-1}的情况;b)矩阵A
A为m×nm\\times n,秩为n,则ATA
A^TA是否正定); - 相似矩阵的2个性质和分类;
- 若尔当阵,若尔当矩阵,若尔当定理。
第三十讲:奇异值分解
本讲我们介绍将一个矩阵写为
A=UΣVT
A=U\\varSigma V^T,分解的因子分别为正交矩阵、对角矩阵、正交矩阵,与前面几讲的分解不同的是,这两个正交矩阵通常是不同的,
而且这个式子可以对任意矩阵使用,不仅限于方阵、可对角化的方阵等
\\color{red}{而且这个式子可以对任意矩阵使用,不仅限于方阵、可对角化的方阵等}。
1.
A=UΣVT
A=U\\varSigma V^T的推导
A=U\\varSigma V^T的推导
在正定一讲中(第二十八讲)我们知道一个正定矩阵可以分解为
A=QΛQT
A=Q\\Lambda Q^T的形式,由于A
A对称性其特征向量是正交的,且其Λ\\Lambda矩阵中的元素皆为正,这就是正定矩阵的奇异值分解。在这种特殊的分解中,我们只需要一个正交矩阵Q
Q就可以使等式成立。在对角化一讲中(第二十二讲),我们知道可对角化的矩阵能够分解为A=SΛSTA=S\\Lambda S^T的形式,其中
S
S的列向量由AA的特征向量组成,但S
S并不是正交矩阵,所以这不是我们希望得到的奇异值分解。
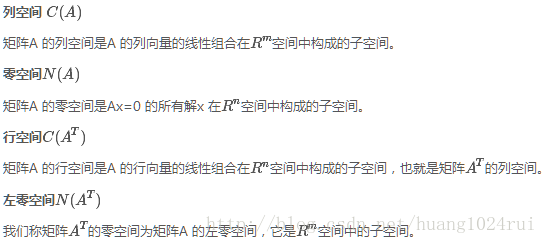
我们先来回顾一下四个空间(AA 是
m×n
m×n 的矩阵):


接下来我们进行推导:
- 1)
A
A 是m×nm×n 的矩阵,在行空间中找个典型变量,记为v1
v_1,然后变换到列空间的某向量,记为u1
u_1,有u1=Av1
u_1=Av_1。

那么这样的变换怎样合到一起,首先,这个行空间能找到一组正交基(格拉姆-施密特告诉我们以任意一组基开始,经过格拉姆-施密特正交化方法就可得到),但这组正交基经过A 变换后不一定能在列空间成为正交基,所以行空间中的正交基要找特殊的。考虑零空间,这些零空间体现在对角矩阵
Σ
Σ中是00。
Av
Av 变换过程中,我希望转换得到的正交单位向量,所以
u1,u2..
u_1,u_2..是单位正交基,同时
v1,v2..
v_1,v_2..也是单位正交基,
Av1
Av_1 等于
u1
u_1 的一个倍数(可以理解为:在奇异值分解中,要找的是行空间的一组正交基,然后变换成列空间的一组正交基。现在要做的是,在
A
A的列空间中找到一组特殊的正交基v1,v2,⋯,vrv_1,v_2,\\cdots,v_r,这组基在
A
A的作用下可以转换为AA的行空间中的一组正交基
u1,u2,⋯,ur
u_1,u_2,\\cdots,u_r)。这种转换关系写成矩阵形式就是:
A[v1 v2 ⋯ vr]=[σ1u1 σ2u2 ⋯ σrur]=[u1 u2 ⋯ ur]⎡⎣⎢⎢⎢⎢⎢σ1σ2⋱σr⎤⎦⎥⎥⎥⎥⎥(1)
A\\Bigg[v_1\\ v_2\\ \\cdots\\ v_r\\Bigg]=\\Bigg[\\sigma_1u_1\\ \\sigma_2u_2\\ \\cdots\\ \\sigma_ru_r\\Bigg]=\\Bigg[u_1\\ u_2\\ \\cdots\\ u_r\\Bigg]\\begin{bmatrix}\\sigma_1& & & \\\\& \\sigma_2& & \\\\& & \\ddots& \\\\& & & \\sigma_r\\end{bmatrix}\\tag{1}
即
Av1=σ1u1, Av2=σ2u2,⋯,Avr=σrur
Av_1=\\sigma_1u_1,\\ Av_2=\\sigma_2u_2,\\cdots,Av_r=\\sigma_ru_r,这些
σ
\\sigma是缩放因子,表示在转换过程中有拉伸或压缩。而
A
A的左零空间和零空间将体现在σ\\sigma的零值中。
我们是想找:
AV=UΣ
AV=UΣ,(对于正定矩阵,这里是
AQ=QΣ
AQ=QΣ)但是发现
与A维数不同
\\color{red}{与A维数不同},我们要找到对任意
A
A都成立的一般形式。
- 2)如果AA 存在零空间,那么行空间是
r
r 维,零空间是n−rn-r 维,我们同样可以取一组正交基。如果基零空间的向量为vr+1,...,vn
v_{r+1},…,v_n,那么Avr+1
Av_{r+1} 将得到零向量,得到对角阵Σ对角线下方有一些0
0。需要把整个RnR^n 空间的标准正交基完善成整个Rm
R^m 空间的标准正交基,在对角阵Σ中用0来完善,所以存在零空间时没问题,但行空间和列空间的基向量才是主要的
\\color{red}{在对角阵Σ中用0 来完善,所以存在零空间时没问题,但行空间和列空间的基向量才是主要的}。
因此算上左零、零空间,我们同样可以对左零、零空间取标准正交基,然后可以把(1)写为:
A[v1 v2 ⋯ vr vr+1 ⋯ vm]=[u1 u2 ⋯ ur ur+1 ⋯ un]⎡⎣⎢⎢⎢⎢⎢⎢σ1⋱σr[0]⎤⎦⎥⎥⎥⎥⎥⎥(2)
A\\Bigg[v_1\\ v_2\\ \\cdots\\ v_r\\ v_{r+1}\\ \\cdots\\ v_m\\Bigg]=\\Bigg[u_1\\ u_2\\ \\cdots\\ u_r\\ u_{r+1}\\ \\cdots \\ u_n\\Bigg]\\left[\\begin{array}{c c c|c}\\sigma_1&&&\\\\&\\ddots&&\\\\&&\\sigma_r&\\\\\\hline&&&\\begin{bmatrix}0\\end{bmatrix}\\end{array}\\right]\\tag{2}
v1, ⋯, vr
v_1,\\ \\cdots,\\ v_r是行空间的标准正交基;
u1, ⋯, ur
u_1,\\ \\cdots,\\ u_r是列空间的标准正交基;
vr+1, ⋯, vn
v_{r+1},\\ \\cdots,\\ v_n是零空间的标准正交基;
ur+1, ⋯, um
u_{r+1},\\ \\cdots,\\ u_m是左零空间的标准正交基。
此时U是m×m正交矩阵,Σ是m×n对角矩阵,VT是n×n正交矩阵。
\\color{red}{此时U是m\\times m正交矩阵,\\varSigma是m\\times n对角矩阵,V^T是n\\times n正交矩阵。}
最终可以写为
AV=UΣ
AV=U\\varSigma,可以看出这十分类似对角化的公式,矩阵
A
A被转化为对角矩阵Σ\\varSigma,我们也注意到
U, V
U,\\ V是两组不同的正交基。(在正定的情况下,
U, V
U,\\ V都变成了
Q
Q。)。进一步可以写作A=UΣV−1A=U\\varSigma V^{-1},因为
V
V是标准正交矩阵所以可以写为A=UΣVTA=U\\varSigma V^T
2.求解
U和V
U和V
U和V
找
V
V:ATA=VΣTUTUΣVT=VΣ2VTA^TA=VΣ^TU^TUΣV^T=VΣ^2V^T,得到的形式即:ATA=QΛQT
A^TA=QΛQ^T,因此ATA
A^TA 是一个正定矩阵,它的特征向量标准正交组成Q
Q,特征值是σ2σ^2 组成Λ
Λ。注意σσ是Av=σu
Av=σu 的伸缩因子,σ2
σ^2 是ATA
A^TA 的特征值。σ
σ取σ2σ^2 的正平方根。找
U
U:AAT=UΣVTVΣTUT=UΣ2UTAA^T=UΣV^TVΣ^TU^T=UΣ^2U^T,同样,形式即:AAT=QΛQT
AA^T =QΛQ^T,因此AAT
AA^T是一个正定矩阵,它的特征向量标准正交组成Q
Q,特征值是σ2σ^2 组成Λ
Λ。注意σσ是Av=σu
Av=σu 的伸缩因子,σ2
σ^2
是AAT
AA^T 的特征值。因此,
AAT
AA^T 和ATA
A^TA 是特征值相同,特征向量不同的相似矩阵。
3.奇异值分解
奇异值分解的定义:
在线性代数的四个子空间中选出合适的基,v1
v_1 到vr
v_r 是行空间的标准正交基,用零空间的标准正交基vr+1
v_{r+1}到vn
v_n 补充完整,u1
u_1 到ur
u_r是列空间的标准正交基,用左零空间的标准正交基ur+1
u_{r+1} 到um
u_m补充完整。A
A 乘以每一个vv 对应一个u
u的方向,Avi=σiuiAv_i=σ_iu_i,可将矩阵对角化A=UΣV−1=UΣVT
A=UΣV^{-1}=UΣV^T。
例子1:
A=[4−343]
A=\\begin{bmatrix}4& 4\\\\-3& 3\\end{bmatrix},我们需要找到:
- 行空间
R2
\\mathbb{R}^2的标准正交基v1,v2
v_1,v_2; - 列空间
R2
\\mathbb{R}^2的标准正交基u1,u2
u_1,u_2; -
σ1>0,σ2>0
\\sigma_1>0, \\sigma_2>0。
在
A=UΣVT
A=U\\varSigma V^T中有两个标准正交矩阵需要求解,我们希望一次只解一个,如何先将
U
U消去来求VV?
这个技巧会经常出现在长方形矩阵中:求
ATA
A^TA,这是一个对称正定矩阵(至少是半正定矩阵),于是有
ATA=VΣTUTUΣVT
A^TA=V\\varSigma^TU^TU\\varSigma V^T,由于
U
U是标准正交矩阵,所以UTU=IU^TU=I,而
ΣTΣ
\\varSigma^T\\varSigma是对角线元素为
σ2
\\sigma^2的对角矩阵。
现在有
ATA=V⎡⎣⎢⎢⎢⎢⎢σ1σ2⋱σn⎤⎦⎥⎥⎥⎥⎥VT
A^TA=V\\begin{bmatrix}\\sigma_1& & & \\\\& \\sigma_2& & \\\\& & \\ddots& \\\\& & & \\sigma_n\\end{bmatrix}V^T,这个式子中
V
V即是ATAA^TA的特征向量矩阵而
Σ2
\\varSigma^2是其特征值矩阵。
同理,我们只想求
U
U时,用AATAA^T消掉
V
V即可。
我们来计算ATA=[44−33][4−343]=[257725]A^TA=\\begin{bmatrix}4& -3\\\\4& 3\\end{bmatrix}\\begin{bmatrix}4& 4\\\\-3& 3\\end{bmatrix}=\\begin{bmatrix}25& 7\\\\7& 25\\end{bmatrix},对于简单的矩阵可以直接观察得到特征向量
ATA[11]=32[11], ATA[1−1]=18[1−1]
A^TA\\begin{bmatrix}1\\\\1\\end{bmatrix}=32\\begin{bmatrix}1\\\\1\\end{bmatrix},\\ A^TA\\begin{bmatrix}1\\\\-1\\end{bmatrix}=18\\begin{bmatrix}1\\\\-1\\end{bmatrix},化为单位向量有
σ1=32, v1=⎡⎣12√12√⎤⎦, σ2=18, v2=⎡⎣12√−12√⎤⎦
\\sigma_1=32,\\ v_1=\\begin{bmatrix}\\frac{1}{\\sqrt{2}}\\\\\\frac{1}{\\sqrt{2}}\\end{bmatrix},\\ \\sigma_2=18,\\ v_2=\\begin{bmatrix}\\frac{1}{\\sqrt{2}}\\\\-\\frac{1}{\\sqrt{2}}\\end{bmatrix}。
到目前为止,我们得到
[4−343]=[u?u?u?u?][32−−√0018−−√]⎡⎣12√12√12√−12√⎤⎦
\\begin{bmatrix}4& 4\\\\-3& 3\\end{bmatrix}=\\begin{bmatrix}u_?& u_?\\\\u_?& u_?\\end{bmatrix}\\begin{bmatrix}\\sqrt{32}& 0\\\\0& \\sqrt{18}\\end{bmatrix}\\begin{bmatrix}\\frac{1}{\\sqrt{2}}& \\frac{1}{\\sqrt{2}}\\\\\\frac{1}{\\sqrt{2}}& -\\frac{1}{\\sqrt{2}}\\end{bmatrix}。
接下来继续求解
U
U。
AAT=UΣVTVΣTUT=UΣ2UTAA^T=U\\varSigma V^TV\\varSigma^TU^T=U\\varSigma^2U^T,求出
AAT
AA^T的特征向量即可得到
U
U,[4−343][44−33]=[320018]\\begin{bmatrix}4& 4\\\\-3& 3\\end{bmatrix}\\begin{bmatrix}4& -3\\\\4& 3\\end{bmatrix}=\\begin{bmatrix}32& 0\\\\0& 18\\end{bmatrix},观察得
AAT[10]=32[10], AAT[01]=18[01]
AA^T\\begin{bmatrix}1\\\\0\\end{bmatrix}=32\\begin{bmatrix}1\\\\0\\end{bmatrix},\\ AA^T\\begin{bmatrix}0\\\\1\\end{bmatrix}=18\\begin{bmatrix}0\\\\1\\end{bmatrix}。
但是我们不能直接使用这一组特征向量,因为式子
AV=UΣ
AV=U\\varSigma明确告诉我们,一旦
V
V确定下来,UU也必须取能够满足该式的向量,所以此处
Av2=[0−18−−√]=u2σ2=[0−1]18−−√
Av_2=\\begin{bmatrix}0\\\\-\\sqrt{18}\\end{bmatrix}=u_2\\sigma_2=\\begin{bmatrix}0\\\\-1\\end{bmatrix}\\sqrt{18},则
u1=[10], u2=[0−1]
u_1=\\begin{bmatrix}1\\\\0\\end{bmatrix},\\ u_2=\\begin{bmatrix}0\\\\-1\\end{bmatrix}。(这个问题在本讲的官方笔记中有详细说明。)
补充:
AB
AB的特征值与BA
BA的特征值相同,证明来自Are the eigenvalues of AB equal to the eigenvalues of BA? (Citation needed!):
取λ≠0
\\lambda\\neq 0,v
v是ABAB在特征值取λ
\\lambda时的的特征向量,则有Bv≠0
Bv\\neq 0,并有λBv=B(λv)=B(ABv)=(BA)Bv
\\lambda
Bv=B(\\lambda v)=B(ABv)=(BA)Bv,所以Bv
Bv是BA
BA在特征值取同一个λ
\\lambda时的特征向量。
再取AB
AB的特征值λ=0
\\lambda=0,则0=detAB=detAdetB=detBA
0=\\det{AB}=\\det{A}\\det{B}=\\det{BA},所以λ=0
\\lambda=0也是BA
BA的特征值,得证。
最终,我们得到
[4−343]=[100−1][32−−√0018−−√]⎡⎣12√12√12√−12√⎤⎦
\\begin{bmatrix}4& 4\\\\-3& 3\\end{bmatrix}=\\begin{bmatrix}1& 0\\\\0& -1\\end{bmatrix}\\begin{bmatrix}\\sqrt{32}& 0\\\\0& \\sqrt{18}\\end{bmatrix}\\begin{bmatrix}\\frac{1}{\\sqrt{2}}& \\frac{1}{\\sqrt{2}}\\\\\\frac{1}{\\sqrt{2}}& -\\frac{1}{\\sqrt{2}}\\end{bmatrix}。
例子2:
再做一个例子,
A=[4836]
A=\\begin{bmatrix}4& 3\\\\8& 6\\end{bmatrix},这是个秩一矩阵,有零空间。
A
A的行空间为[43]\\begin{bmatrix}4\\\\3\\end{bmatrix}的倍数,
A
A的列空间为[48]\\begin{bmatrix}4\\\\8\\end{bmatrix}的倍数。
-
标准化向量得
v1=[0.80.6], u1=15√[12]
v_1=\\begin{bmatrix}0.8\\\\0.6\\end{bmatrix},\\ u_1=\\frac{1}{\\sqrt{5}}\\begin{bmatrix}1\\\\2\\end{bmatrix}。 -
ATA=[4386][4836]=[80606045]
A^TA=\\begin{bmatrix}4& 8\\\\3& 6\\end{bmatrix}\\begin{bmatrix}4& 3\\\\8& 6\\end{bmatrix}=\\begin{bmatrix}80& 60\\\\60& 45\\end{bmatrix},由于A
A是秩一矩阵,则ATAA^TA也不满秩,所以必有特征值0
0,则另特征值一个由迹可知为125125。 -
继续求零空间的特征向量,有
v2=[0.6−0,8], u1=15√[2−1]
v_2=\\begin{bmatrix}0.6\\\\-0,8\\end{bmatrix},\\ u_1=\\frac{1}{\\sqrt{5}}\\begin{bmatrix}2\\\\-1\\end{bmatrix}
最终得到
[4836]=[122−−1−−−][125−−−√000−][0.80.6−−−0.6−0.8−−−−]
\\begin{bmatrix}4& 3\\\\8& 6\\end{bmatrix}=\\begin{bmatrix}1& \\underline {2}\\\\2& \\underline{-1}\\end{bmatrix}\\begin{bmatrix}\\sqrt{125}& 0\\\\0& \\underline{0}\\end{bmatrix}\\begin{bmatrix}0.8& 0.6\\\\\\underline{0.6}& \\underline{-0.8}\\end{bmatrix},其中下划线部分都是与零空间相关的部分。
-
v1, ⋯, vr
v_1,\\ \\cdots,\\ v_r是行空间的标准正交基; -
u1, ⋯, ur
u_1,\\ \\cdots,\\ u_r是列空间的标准正交基; -
vr+1, ⋯, vn
v_{r+1},\\ \\cdots,\\ v_n是零空间的标准正交基; -
ur+1, ⋯, um
u_{r+1},\\ \\cdots,\\ u_m是左零空间的标准正交基。
通过将矩阵写为
Avi=σiui
Av_i=\\sigma_iu_i形式,将矩阵对角化,向量
u, v
u,\\ v之间没有耦合,
A
A乘以每个vv都能得到一个相应的
u
u。
4.本章总结
1.
奇异值分解的定义:
在线性代数的四个子空间中选出合适的基,v1v_1 到vr
v_r 是行空间的标准正交基,用零空间的标准正交基vr+1
v_{r+1}到vn
v_n 补充完整,u1
u_1 到ur
u_r是列空间的标准正交基,用左零空间的标准正交基ur+1
u_{r+1} 到um
u_m补充完整。A
A 乘以每一个vv 对应一个u
u的方向,Avi=σiuiAv_i=σ_iu_i,可将矩阵对角化A=UΣV−1=UΣVT
A=UΣV^{-1}=UΣV^T。
2.
A[v1 v2 ⋯ vr vr+1 ⋯ vm]=[u1 u2 ⋯ ur ur+1 ⋯ un]⎡⎣⎢⎢⎢⎢⎢⎢σ1⋱σr[0]⎤⎦⎥⎥⎥⎥⎥⎥(2)
A\\Bigg[v_1\\ v_2\\ \\cdots\\ v_r\\ v_{r+1}\\ \\cdots\\ v_m\\Bigg]=\\Bigg[u_1\\ u_2\\ \\cdots\\ u_r\\ u_{r+1}\\ \\cdots \\ u_n\\Bigg]\\left[\\begin{array}{c c c|c}\\sigma_1&&&\\\\&\\ddots&&\\\\&&\\sigma_r&\\\\\\hline&&&\\begin{bmatrix}0\\end{bmatrix}\\end{array}\\right]\\tag{2}
v1, ⋯, vr
v_1,\\ \\cdots,\\ v_r是行空间的标准正交基;
u1, ⋯, ur
u_1,\\ \\cdots,\\ u_r是列空间的标准正交基;
vr+1, ⋯, vn
v_{r+1},\\ \\cdots,\\ v_n是零空间的标准正交基;
ur+1, ⋯, um
u_{r+1},\\ \\cdots,\\ u_m是左零空间的标准正交基。
此时U是m×m正交矩阵,Σ是m×n对角矩阵,VT是n×n正交矩阵。
\\color{red}{此时U是m\\times m正交矩阵,\\varSigma是m\\times n对角矩阵,V^T是n\\times n正交矩阵。}
- 奇异值分解中
V与U
V与U的求解:
找
V
V:ATA=VΣTUTUΣVT=VΣ2VTA^TA=VΣ^TU^TUΣV^T=VΣ^2V^T,得到的形式即:ATA=QΛQT
A^TA=QΛQ^T,因此ATA
A^TA 是一个正定矩阵,它的特征向量标准正交组成Q
Q,特征值是σ2σ^2 组成Λ
Λ。注意σσ是Av=σu
Av=σu 的伸缩因子,σ2
σ^2 是ATA
A^TA 的特征值。σ
σ取σ2σ^2 的正平方根。找
U
U:AAT=UΣVTVΣTUT=UΣ2UTAA^T=UΣV^TVΣ^TU^T=UΣ^2U^T,同样,形式即:AAT=QΛQT
AA^T =QΛQ^T,因此AAT
AA^T是一个正定矩阵,它的特征向量标准正交组成Q
Q,特征值是σ2σ^2 组成Λ
Λ。注意σσ是Av=σu
Av=σu 的伸缩因子,σ2
σ^2 是AAT
AA^T 的特征值。因此,
AAT
AA^T 和ATA
A^TA 是特征值相同,特征向量不同的相似矩阵。




![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)