
第十九讲 行列式公式和代数余子式
1.行列式公式
上一讲中,我们从三个简单的性质扩展出了一些很好的推论,本讲将继续使用这三条基本性质:
detI=1
\\det I=1;
- 交换行行列式变号;
- 对行列式的每一行都可以单独使用线性运算,其值不变。
我们使用这三条性质推导二阶方阵行列式:
∣∣∣acbd∣∣∣=∣∣∣ac0d∣∣∣+∣∣∣0cbd∣∣∣=∣∣∣ac00∣∣∣+∣∣∣a00d∣∣∣+∣∣∣0cb0∣∣∣+∣∣∣00bd∣∣∣=ad−bc
\\begin{vmatrix}a& b\\\\c& d\\end{vmatrix}=\\begin{vmatrix}a& 0\\\\c& d\\end{vmatrix}+\\begin{vmatrix}0& b\\\\c& d\\end{vmatrix}=\\begin{vmatrix}a& 0\\\\c& 0\\end{vmatrix}+\\begin{vmatrix}a& 0\\\\0& d\\end{vmatrix}+\\begin{vmatrix}0& b\\\\c& 0\\end{vmatrix}+\\begin{vmatrix}0& b\\\\0& d\\end{vmatrix}=ad-bc
按照这个方法,我们继续计算三阶方阵的行列式,可以想到,我们保持第二、三行不变,将第一行拆分为个行列式之和,再将每一部分的第二行拆分为三部分,这样就得到九个行列式,再接着拆分这九个行列式的第三行,最终得到二十七个行列式。可以想象到,这些矩阵中有很多值为零的行列式,我们只需要找到不为零的行列式,求和即可。
∣∣∣∣a11a21a31a12a22a32a13a23a33∣∣∣∣=∣∣∣∣a11000a22000a33∣∣∣∣+∣∣∣∣a110000a320a230∣∣∣∣+∣∣∣∣0a210a120000a33∣∣∣∣+∣∣∣∣00a31a12000a230∣∣∣∣+∣∣∣∣0a21000a32a1300∣∣∣∣+∣∣∣∣00a310a220a1300∣∣∣∣
\\begin{vmatrix}a_{11}& a_{12}& a_{13}\\\\a_{21}& a_{22}& a_{23}\\\\a_{31}& a_{32}& a_{33}\\end{vmatrix}=\\begin{vmatrix}a_{11}& 0& 0\\\\0& a_{22}& 0\\\\0& 0& a_{33}\\end{vmatrix}+\\begin{vmatrix}a_{11}& 0& 0\\\\0& 0& a_{23}\\\\0& a_{32}& 0\\end{vmatrix}+\\begin{vmatrix}0& a_{12}& 0\\\\a_{21}& 0& 0\\\\0& 0& a_{33}\\end{vmatrix}+\\begin{vmatrix}0& a_{12}& 0\\\\0& 0& a_{23}\\\\a_{31}& 0& 0\\end{vmatrix}
+\\begin{vmatrix}0& 0& a_{13}\\\\a_{21}& 0& 0\\\\0& a_{32}& 0\\end{vmatrix}+\\begin{vmatrix}0& 0& a_{13}\\\\0& a_{22}& 0\\\\a_{31}& 0& 0\\end{vmatrix}
原式=a11a22a33−a11a23a32−a12a21a33+a12a23a31+a13a21a32−a13a22a31(1)
原式=a_{11}a_{22}a_{33}-a_{11}a_{23}a_{32}-a_{12}a_{21}a_{33}+a_{12}a_{23}a_{31}+a_{13}a_{21}a_{32}-a_{13}a_{22}a_{31} \\tag{1}
同理,我们想继续推导出阶数更高的式子,按照上面的式子可知
n
n阶行列式应该可以分解成n!n!个非零行列式(占据第一行的元素有
n
n种选择,占据第二行的元素有n−1n-1种选择,以此类推得
n!
n!):
detA=∑n!±a1αa2βa3γ⋯anω,(α,β,γ,ω)=Pnn(2)
\\det A=\\sum_{n!} \\pm a_{1\\alpha}a_{2\\beta}a_{3\\gamma}\\cdots a_{n\\omega}, (\\alpha, \\beta, \\gamma, \\omega)=P_n^n\\tag{2}
这个公式还不完全,接下来需要考虑如何确定符号:
∣∣∣∣∣∣∣001¯1−01¯1−01¯1−001−001¯∣∣∣∣∣∣∣
\\begin{vmatrix}0& 0& \\overline 1& \\underline 1\\\\0& \\overline 1& \\underline 1& 0\\\\\\overline 1& \\underline 1& 0& 0\\\\\\underline 1& 0& 0& \\overline 1\\end{vmatrix}
如上图矩阵所示:
- 观察带有下划线的元素,它们的排列是
(4,3,2,1)
(4,3,2,1),变为
(1,2,3,4)
(1,2,3,4)需要两步操作,所以应取
+
+正;
- 观察带有上划线的元素,它们的排列是(3,2,1,4)(3,2,1,4),变为
(1,2,3,4)
(1,2,3,4)需要一步操作,所以应取
−
-负。
- 观察其他元素,我们无法找出除了上面两种以外的排列方式,于是该行列式值为零,这是一个奇异矩阵。
即正负号的选取\\color{red}{正负号的选取}可以是:用逆序数判断,即我们把全排列的顺序写出来,比如第一行我们选了第2列,第二行选第3列,第三行选第1列,那么序列就是231,逆序数就是从左到右遍历每一个数,统计右侧有几个数比自己小,这里231,2之后有一个,3之后也有一个,共二个,称此为偶排列,奇数次则为奇排列。偶排列时取正号,奇排列取负,原理在于对一个排列做一次交换后奇排列变偶排列,偶排列变奇排列,而123456…n是偶排列,必须为加。
2.代数余子式 cofactors
此处引入代数余子式(cofactor)的概念,它的作用是把
n
n阶行列式化简为n−1n-1阶行列式。
于是我们把
(1)
(1)式改写为:
a11(a22a33−a23a32)+a12(a21a33−a23a31)+a13(a21a32−a22a31)
a_{11}(a_{22}a_{33}-a_{23}a_{32})+a_{12}(a_{21}a_{33}-a_{23}a_{31})+a_{13}(a_{21}a_{32}-a_{22}a_{31})
∣∣∣∣a11000a22a320a23a33∣∣∣∣+∣∣∣∣0a21a31a12000a23a33∣∣∣∣+∣∣∣∣0a21a310a22a32a1300∣∣∣∣
\\begin{vmatrix}a_{11}& 0& 0\\\\0& a_{22}& a_{23}\\\\0& a_{32}& a_{33}\\end{vmatrix}+\\begin{vmatrix}0& a_{12}& 0\\\\a_{21}& 0& a_{23}\\\\a_{31}& 0& a_{33}\\end{vmatrix}+\\begin{vmatrix}0& 0& a_{13}\\\\a_{21}& a_{22}& 0\\\\a_{31}& a_{32}& 0\\end{vmatrix}
于是,我们可以定义
aij
a_{ij}的代数余子式:将原行列式的第
i
i行与第jj列抹去后得到的
n−1
n-1阶行列式记为
Cij
C_{ij},
i+j为偶时时取+,i+j为奇时取−
\\color{red}{i+j为偶时时取+,i+j为奇时取-}。
现在再来完善式子
(2)
(2):将行列式
A
A沿第一行展开:
\\det A=a_{11}C_{11}+a_{12}C_{12}+\\cdots+a_{1n}C_{1n}
到现在为止,我们了解了
三种求行列式的方法
\\color{red}{三种求行列式的方法}:
消元,detA就是主元的乘积
\\color{red}{消元,\\det A就是主元的乘积};
使用(2)式展开,求n!项之积
\\color{red}{使用(2)式展开,求n!项之积};
使用代数余子式
\\color{red}{使用代数余子式}。
对于矩阵行列式的计算,消元的得到主元是一个很好的方法,与之相比行列式的展开公式较为复杂,而代数余子式的方法介于两者之间,它的核心想法是通过降阶来将原来的行列式展开成更简单的行列式。
计算例题:
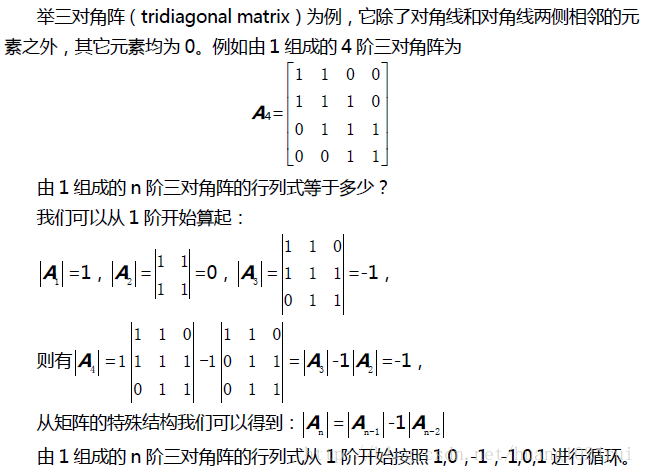
A4=∣∣∣∣∣∣1100111001110011∣∣∣∣∣∣=沿第一行展开∣∣∣∣110111011∣∣∣∣−∣∣∣∣100111011∣∣∣∣=−1−0=−1
A_4=\\begin{vmatrix}1& 1& 0& 0\\\\1& 1& 1& 0\\\\0& 1& 1& 1\\\\0& 0& 1& 1\\end{vmatrix}\\stackrel{沿第一行展开}{=}\\begin{vmatrix}1& 1& 0\\\\1& 1& 1\\\\0& 1& 1\\end{vmatrix}-\\begin{vmatrix}1& 1& 0\\\\0& 1& 1\\\\0& 1& 1\\end{vmatrix}=-1-0=-1
可观察出周期为6:

3.总结
1.行列式展开的正负号;
2.计算行列式的三种方法;
3.代数余子式求解时的正负号。
第二十讲:克拉默法则、逆矩阵、体积
本讲主要介绍逆矩阵的应用。
1.求逆矩阵
我们从逆矩阵开始,对于二阶矩阵有
[acbd]−1=1ad−bc[d−c−ba]
\\begin{bmatrix}a& b\\\\c& d\\end{bmatrix}^{-1}=\\frac{1}{ad-bc}\\begin{bmatrix}d& -b\\\\-c& a\\end{bmatrix}。观察易得,系数项就是行列式的倒数,而矩阵则是由一系列代数余子式组成的。先给出公式:
A−1=1detACT(1)
A^{-1}=\\frac{1}{\\det A}C^T \\tag{1}
注:
1. 矩阵外因子的分母是矩阵的行列式的值,而矩阵是“代数余子式矩阵”(cofactor matrix)C的转置,常被称为”
伴随矩阵
\\color{red}{伴随矩阵}”.
2. 逆矩阵公式的一个好处就是,我们从中可以看到,当改变原矩阵中的一个元素时,给逆矩阵带来了怎样的变化。
证明:
观察这个公式是如何运作的,化简公式得
ACT=(detA)I
AC^T=(\\det A)I,写成矩阵形式有
⎡⎣⎢⎢a11⋮an1a12⋮an2⋯⋱⋯a1n⋮ann⎤⎦⎥⎥⎡⎣⎢⎢⎢⎢⎢C11C12⋮C1n⋯⋯⋱⋯Cn1Cn2⋮Cnn⎤⎦⎥⎥⎥⎥⎥=Res
\\begin{bmatrix}a_{11}& a_{12}& \\cdots& a_{1n}\\\\\\vdots& \\vdots& \\ddots& \\vdots\\\\a_{n1}& a_{n2}& \\cdots& a_{nn}\\end{bmatrix}\\begin{bmatrix}C_{11}& \\cdots& C_{n1}\\\\C_{12}& \\cdots& C_{n2}\\\\\\vdots& \\ddots& \\vdots\\\\C_{1n}& \\cdots& C_{nn}\\end{bmatrix}=Res
对于这两个矩阵的乘积,观察其结果的元素
Res11=a11C11+a12C12+⋯+a1nC1n
Res_{11}=a_{11}C_{11}+a_{12}C_{12}+\\cdots+a_{1n}C_{1n},这正是上一讲提到的将行列式按第一行展开的结果。同理,对
Res22,⋯,Resnn
Res_{22}, \\cdots, Res_{nn}都有
Resii=detA
Res_{ii}=\\det A,即对角线元素均为
detA
\\det A。
再来看非对角线元素:回顾二阶的情况,如果用第一行乘以第二行的代数余子式
a11C21+a12C22
a_{11}C_{21}+a_{12}C_{22},得到
a(−b)+ab=0
a(-b)+ab=0。换一种角度看问题,
a(−b)+ab=0
a(-b)+ab=0也是一个矩阵的行列式值,即
As=[aabb]
A_{s}=\\begin{bmatrix}a& b\\\\a& b\\end{bmatrix}。将
detAs
\\det A_{s}按第二行展开,也会得到
detAs=a(−b)+ab
\\det A_{s}=a(-b)+ab,因为行列式有两行相等所以行列式值为零。
推广到
n
n阶,我们来看元素Res1n=a11Cn1+a12Cn2+⋯+a1nCnnRes_{1n}=a_{11}C_{n1}+a_{12}C_{n2}+\\cdots+a_{1n}C_{nn},该元素是第一行与最后一行的代数余子式相乘之积。这个式子也可以写成一个特殊矩阵的行列式,即矩阵
As=⎡⎣⎢⎢⎢⎢⎢⎢⎢a11a21⋮an−a1a11a12a22⋮an−12a12⋯⋯⋱⋯⋯a1na2n⋮an−1na1n⎤⎦⎥⎥⎥⎥⎥⎥⎥
A_{s}=\\begin{bmatrix}a_{11}& a_{12}& \\cdots& a_{1n}\\\\a_{21}& a_{22}& \\cdots& a_{2n}\\\\\\vdots& \\vdots& \\ddots& \\vdots\\\\a_{n-a1}& a_{n-12}& \\cdots& a_{n-1n}\\\\a_{11}& a_{12}& \\cdots& a_{1n}\\end{bmatrix}。计算此矩阵的行列式,将
detAs
\\det A_{s}按最后一行展开,也得到
detAs=a11Cn1+a12Cn2+⋯+a1nCnn
\\det A_{s}=a_{11}C_{n1}+a_{12}C_{n2}+\\cdots+a_{1n}C_{nn}。同理,行列式
As
A_{s}有两行相等,其值为零。
结合对角线元素与非对角线元素的结果,我们得到
Res=⎡⎣⎢⎢⎢⎢⎢detA0⋮00detA⋮0⋯⋯⋱⋯00⋮detA⎤⎦⎥⎥⎥⎥⎥
Res=\\begin{bmatrix}\\det A& 0& \\cdots& 0\\\\0& \\det A& \\cdots& 0\\\\\\vdots& \\vdots& \\ddots& \\vdots\\\\0& 0& \\cdots& \\det A\\end{bmatrix},也就是
(1)
(1)等式右边的
(detA)I
(\\det A)I,得证。
2.求解
Ax=b
Ax=b
因为我们现在有了逆矩阵的计算公式,所以对
Ax=b
Ax=b有
x=A−1b=1detACTb
x=A^{-1}b=\\frac{1}{\\det A}C^Tb,这就是计算
x
x的公式,即克莱默法则(Cramer’s rule)。即
克莱默法则\\color{red}{克莱默法则}:
1. 定义:对于可逆矩阵A
A,方程Ax=bAx=b必然有解x=A−1b
x=A^{-1}b,将逆矩阵公式代入有:
x=1detACTb
x=\\frac{1}{\\det A}C^Tb。
2. 克莱默法则从另外一个角度来看,实际上x
x的分量为:
xi=detBidetAx_i=\\frac{\\det B_i}{\\det A}
其中矩阵Bi
B_i是向量b
b替代矩阵AA的第j
j列所得到的新矩阵。
对2进行解析:
现在来观察x=1detACTbx=\\frac{1}{\\det A}C^Tb,我们将得到的解拆分开来,对
x
x的第一个分量有x1=y1detAx_1=\\frac{y_1}{\\det A},这里
y1
y_1是一个数字,其值为
y1=b1C11+b2C21+⋯+bnCn1
y_1=b_1C_{11}+b_2C_{21}+\\cdots+b_nC_{n1},每当我们看到数字与代数余子式乘之积求和时,都应该联想到求行列式,也就是说
y1
y_1可以看做是一个矩阵的行列式,我们设这个矩阵为
B1
B_1。所以有
xi=detB1detA
x_i=\\frac{\\det B_1}{\\det A},同理有
x2=detB2detA
x_2=\\frac{\\det B_2}{\\det A},
x3=detB3detA
x_3=\\frac{\\det B_3}{\\det A}。
而
B1
B_1是一个型为
[ba2a3⋯an]
\\Bigg[b a_2 a_3 \\cdots a_n\\Bigg]的矩阵,即将矩阵
A
A的第一列变为bb向量而得到的新矩阵。其实很容易看出,
detB1
\\det B_1可以沿第一列展开得到
y1=b1C11+b2C21+⋯+bnCn1
y_1=b_1C_{11}+b_2C_{21}+\\cdots+b_nC_{n1}。
一般的,有
Bj=[a1a2⋯aj−1baj+1⋯an]
B_j=\\Bigg[a_1 a_2 \\cdots a_{j-1} b a_{j+1} \\cdots a_n\\Bigg],即将矩阵
A
A的第jj列变为
b
b向量而得到的新矩阵。所以,对于解的分量有xi=detBidetAx_i=\\frac{\\det B_i}{\\det A}。
这个公式虽然很漂亮,但是并不方便计算。因为:

detB1=b1C11+b2C21+⋯+bnCn1
\\det B_1=b_1C_{11}+b_2C_{21}+\\cdots+b_nC_{n1}使列向量
CTb
C^Tb的第一个分量,也对应为列向量
x
x的第一个分量。
矩阵BjB_j的行列式的数值是伴随矩阵
CT
C_T的第
j
j 行与向量
b
b 点积的结果。此处我们用到了行列式的性质10。相比于消元法,采用克莱姆法则计算方程的解效率较低。所以克莱姆法则计算量太大,不适合编程,消元法可以很好的解决问题,matlab就是用消元法来求解的。
3.行列式的几何意义——体积(Volume)
三阶矩阵A 行列式的绝对值等于以矩阵A 行(列)向量为边所构成的平行六面体的体积。行列式的正负对应左手系和右手系。之前提到过行列式是将矩阵的信息压缩成一个数,可以将“体积”视为它压缩后给出的信息。
-
先提出命题:行列式的绝对值等于一个箱子的体积。
来看三维空间中的情形,对于3
3阶方阵AA,取第一行(a1,a2,a3)
(a_1,a_2,a_3),令其为三维空间中点A1
A_1的坐标,同理有点A2,A3
A_2, A_3。连接这三个点与原点可以得到三条边,使用这三条边展开得到一个平行六面体,∥detA∥
\\left\\|\\det A\\right\\|就是该平行六面体的体积。 -
对于三阶单位矩阵,其体积为
detI=1
\\det I=1,此时这个箱子是一个单位立方体。这其实也证明了前面学过的行列式性质1。 -
于是我们想,如果能接着证明性质2、3即可证明体积与行列式的关系。
对于行列式性质2,我们交换两行并不会改变箱子的大小,同时行列式的绝对值也没有改变,得证。
1) 现在我们取矩阵A=Q
A=Q,而Q
Q是一个标准正交矩阵,此时这个箱子是一个立方体,可以看出其实这个箱子就是刚才的单位立方体经过旋转得到的。对于标准正交矩阵,有QTQ=IQ^TQ=I,等式两边取行列式得det(QTQ)=1=∣∣QT∣∣|Q|
\\det(Q^TQ)=1=\\left|Q^T\\right|\\left|Q\\right|,而根据行列式性质10有∣∣QT∣∣=|Q|
\\left|Q^T\\right|=\\left|Q\\right|,所以原式=|Q|2=1,|Q|=±1
原式=\\left|Q\\right|^2=1, \\left|Q\\right|=\\pm 1。
2) 接下来在考虑不再是“单位”的立方体,即长方体。 假设Q
Q矩阵的第一行翻倍得到新矩阵Q2Q_2,此时箱子变为在第一行方向上增加一倍的长方体箱子,也就是两个“标准正交箱子”在第一行方向上的堆叠。易知这个长方体箱子是原来体积的两倍,而根据行列式性质3.a有detQ2=detQ
\\det Q_2=\\det Q,于是体积也符合行列式的数乘性质。
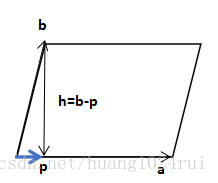
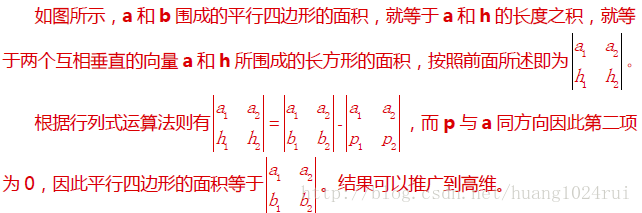
二阶行列式是平行四边形的面积 。
- 我们来看二阶方阵的情形,
∣∣∣a+a′cb+b′d∣∣∣=∣∣∣acbd∣∣∣+∣∣∣a′cb′d∣∣∣
\\begin{vmatrix}a+a\’& b+b\’\\\\c& d\\end{vmatrix}=\\begin{vmatrix}a& b\\\\c& d\\end{vmatrix}+\\begin{vmatrix}a\’& b\’\\\\c& d\\end{vmatrix}。在二阶情况中,行列式就是一个求平行四边形面积的公式,原来我们求由四个点
(0,0),(a,b),(c,d),(a+c,b+d)
(0,0), (a,b), (c,d), (a+c,b+d)围成的四边形的面积,需要先求四边形的底边长,再做高求解,现在只需要计算
detA=ad−bc
\\det A=ad-bc即可(更加常用的是求由
(0,0),(a,b),(c,d)
(0,0), (a,b), (c,d)围成的三角形的面积,即
12ad−bc
\\frac{1}{2}ad-bc)。
2.


即:如果知道了歪箱子的顶点坐标,求面积(二阶情形)或体积(三阶情形)时,我们不再需要开方、求角度,只需要计算行列式的值就行了。
再多说两句我们通过好几讲得到的这个公式,在一般情形下,由点
(x1,y1),(x2,y2),(x3,y3)
(x_1,y_1), (x_2,y_2), (x_3,y_3)围成的三角形面积等于
12∣∣∣∣∣x1x2x3y1y2y3111∣∣∣∣∣
\\frac{1}{2}\\begin{vmatrix}x_1& y_1& 1\\\\x_2& y_2& 1\\\\x_3& y_3& 1\\end{vmatrix},计算时分别用第二行、第三行减去第一行化简到第三列只有一个
1
1(这个操作实际作用是将三角形移动到原点),得到12∣∣∣∣∣x1x2−x1x3−x1y1y2−y1y3−y1100∣∣∣∣∣\\frac{1}{2}\\begin{vmatrix}x_1& y_1& 1\\\\x_2-x_1& y_2-y_1& 0\\\\x_3-x_1& y_3-y_1& 0\\end{vmatrix},再按照第三列展开,得到三角形面积等于
(x2−x1)(y3−y1)−(x3−x1)(y2−y1)2
\\frac{(x_2-x_1)(y_3-y_1)-(x_3-x_1)(y_2-y_1)}{2}。
4.总结
1.矩阵的逆
A−1=1detACT
A^{-1}=\\frac{1}{\\det A}C^T
2.
克莱默法则
\\color{red}{克莱默法则}:
1. 定义:对于可逆矩阵A
A,方程Ax=bAx=b必然有解x=A−1b
x=A^{-1}b,将逆矩阵公式代入有:
x=1detACTb
x=\\frac{1}{\\det A}C^Tb。
2. 克莱默法则从另外一个角度来看,实际上x
x的分量为:
xi=detBidetAx_i=\\frac{\\det B_i}{\\det A}
其中矩阵Bi
B_i是向量b
b替代矩阵AA的第j
j列所得到的新矩阵。
3.行列式的几何意义:2维为平行四边形面积,3维为立方体的面积。
第二十一讲:特征值和特征向量
1.特征值、特征向量的由来
给定矩阵AA,矩阵
A
A乘以向量xx,就像是使用矩阵
A
A作用在向量xx上,最后得到新的向量
Ax
Ax。在这里,矩阵
A
A就像是一个函数,接受一个向量xx作为输入,给出向量
Ax
Ax作为输出。
在这一过程中,我们对一些特殊的向量很感兴趣,他们在输入(
x
x)输出(AxAx)的过程中始终保持同一个方向,这是比较特殊的,因为在大多情况下,
Ax
Ax与
x
x指向不同的方向。
在这种特殊的情况下,AxAx平行于
x
x,我们把满足这个条件的xx成为特征向量
\\color{red}{特征向量}(Eigen vector),而λ
λ为AA 的特征值
\\color{red}{特征值} 。这个平行条件用方程表示就是:
Ax=λx(1)
Ax=\\lambda x\\tag{1}
- 对这个式子,我们试着计算特征值为
0
0的特征向量,此时有Ax=0Ax=0,也就是特征值为
0
0的特征向量应该位于AA的零空间中。
矩阵是奇异的,那么它将有一个特征值为λ=0
\\color{red}{ 矩阵是奇异的,那么它将有一个特征值为\\lambda = 0}。
-
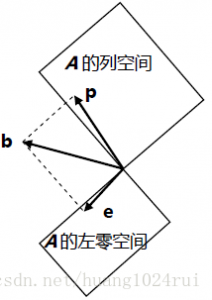
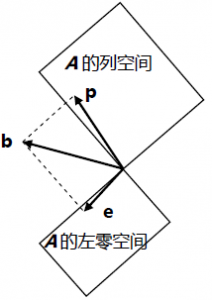
我们再来看投影矩阵
P=A(ATA)−1AT
P=A(A^TA)^{-1}A^T的特征值和特征向量。
-
用向量
b
b乘以投影矩阵PP得到投影向量Pb
Pb,在这个过程中,只有当b
b已经处于投影平面(即AA的列空间)中时,Pb
Pb与b
b才是同向的,此时bb投影前后不变(Pb=1⋅b
Pb=1\\cdot
b)。即在投影平面中的所有向量都是投影矩阵的特征向量,而他们的特征值均为1。 -
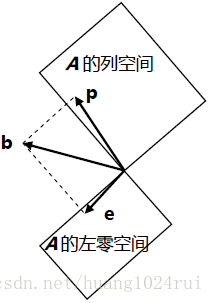
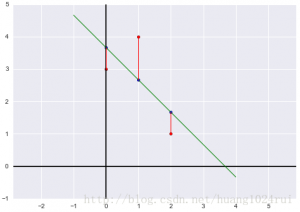
再来观察投影平面的法向量,也就是投影一讲中的
e
e向量。我们知道对于投影,因为e⊥C(A)e\\bot
C(A),所以Pe=0e
Pe=0e,即特征向量e的特征值为0。
-

投影矩阵P=A(ATA)−1AT的特征值为λ=1,0
\\color{red}{投影矩阵P=A(A^TA)^{-1}A^T的特征值为\\lambda=1, 0}。
-
再多讲一个例子,二阶置换矩阵
A=[0110]
A=\\begin{bmatrix}0& 1\\\\1& 0\\end{bmatrix},经过这个矩阵处理的向量,其元素会互相交换。即:交换向量[x1x2]
[x_1 x_2]变为[x2x1]
[x_2 x_1]的,即[x1x2]A=[x2x1]
[x_1 x_2]A=[x_2 x_1],x1,x2
x_1,x_2为列向量,A
A为列向量线性组合的系数。交换后的[x2x1][x_2 x_1]是初始向量[x1x2]
[x_1 x_2]与一个因子的乘积。那么特征值为
1
1的特征向量(即经过矩阵交换元素前后仍然不变)应该型为[11]\\begin{bmatrix}1\\\\1\\end{bmatrix}。特征值为
−1
-1的特征向量(即经过矩阵交换元素前后方向相反)应该型为[1−1]
\\begin{bmatrix}1\\\\-1\\end{bmatrix}。
从例三可得出特征值的性质:
1.对于一个n×n
n\\times
n的矩阵,将会有n
n个特征值,而这些特征值的和与该矩阵对角线元素的和相同,因此我们把矩阵对角线元素称为矩阵的迹(trace)。∑i=1nλi=∑i=1naii\\sum_{i=1}^n
\\lambda_i=\\sum_{i=1}^n a_{ii}
2.对称矩阵,其特征向量互相垂直。
根据前面学到的行列式的性质,则有置换矩阵、投影矩阵,矩阵越特殊,则我们得到的特征值与特征向量也越特殊。看置换矩阵中的特征值,两个实数1,−1,而且它们的特征向量是正交的。
\\color{red}{根据前面学到的行列式的性质,则有置换矩阵、投影矩阵,矩阵越特殊,则我们得到的特征值与特征向量也越特殊。看置换矩阵中的特征值,两个实数1, -1,而且它们的特征向量是正交的。}
在上面二阶转置矩阵的例子中,如果我们求得了一个特征值
1
1,那么利用迹的性质,我们就可以直接推出另一个特征值是−1-1。
证明2:
证明2:
对称矩阵的特征向量正交:
λ1
λ_1和
λ2
λ_2对是对称矩阵
(A=AT)
(A=A^T)的两个不同的特征值,对应的特征向量分别为
x1
x_1 和
x2
x_2 。则有
Ax1=λx1
Ax_1=λx_1,左乘
x2
x_2得
xT2Ax1=λ1xT2x1
x^T_2Ax_1=λ1x^T_2x_1。而又有
xT2Ax1=xT2ATx1=(Ax2)Tx1=(λ2x2)Tx1=λ2xT2x1
x^T_2Ax_1=x^T_2A^Tx_1=(Ax_2)^Tx_1=(λ_2x_2)^Tx_1=λ_2x^T_2x^1。因此有
(λ1−λ2)xT2x1=0
(λ_1−λ_2)x^T_2x_1=0,而两特征值不等,所以两特征向量正交。
2.求解
Ax=λx
Ax=\\lambda x
对于方程
Ax=λx
Ax=\\lambda x,有两个未知数,我们需要利用一些技巧从这一个方程中一次解出两个未知数,先移项得
(A−λI)x=0
(A-\\lambda I)x=0。
观察
(A−λI)x=0
(A-\\lambda I)x=0,右边的矩阵相当于将
A
A矩阵平移了λ\\lambda个单位,而如果方程有解,则这个平移后的矩阵
(A−λI)
(A-\\lambda I)一定是奇异矩阵,否则唯一的x必须为零向量,零向量是没有用的特征向量。
det(A−λI)=0(2)
\\det{(A-\\lambda{I})}=0\\tag{2}
这样一来,方程中就没有
x
x了,这个方程也叫作特征方程(characteristic equation)。有了特征值,代回(A−λI)x=0(A-\\lambda I)x=0,继续求
(A−λI)
(A-\\lambda I)的零空间即可。
2.1 例1
现在计算一个简单的例子,
A=[3113]
A=\\begin{bmatrix}3& 1\\\\1& 3\\end{bmatrix}。
则计算
det(A−λI)=∣∣∣3−λ113−λ∣∣∣
\\det{(A-\\lambda{I})}=\\begin{vmatrix}3-\\lambda& 1\\\\1& 3-\\lambda\\end{vmatrix},也就是对角矩阵平移再取行列式。原式继续化简得
(3−λ)2−1=λ2−6λ+8=0,λ1=4,λ2=2
(3-\\lambda)^2-1=\\lambda^2-6\\lambda+8=0,
\\lambda_1=4,\\lambda_2=2。可以看到一次项系数
−6
-6与矩阵的迹有关,常数项与矩阵的行列式有关。
继续计算特征向量,
A−4I=[−111−1]
A-4I=\\begin{bmatrix}-1& 1\\\\1& -1\\end{bmatrix},显然矩阵是奇异的(如果是非奇异说明特征值计算有误),解出矩阵的零空间
x1=[11]
x_1=\\begin{bmatrix}1\\\\1\\end{bmatrix};同理计算另一个特征向量,
A−2I=[1111]
A-2I=\\begin{bmatrix}1& 1\\\\1& 1\\end{bmatrix},解出矩阵的零空间
x2=[1−1]
x_2=\\begin{bmatrix}1\\\\-1\\end{bmatrix}。
回顾前面转置矩阵的例子,对矩阵
A′=[0110]
A\’=\\begin{bmatrix}0& 1\\\\1& 0\\end{bmatrix}有λ1=1,x1=[11],λ2=−1,x2=[−11]
\\lambda_1=1, x_1=\\begin{bmatrix}1\\\\1\\end{bmatrix}, \\lambda_2=-1, x_2=\\begin{bmatrix}-1\\\\1\\end{bmatrix}。看转置矩阵
A′
A\’与本例中的对称矩阵A
A有什么联系。易得A=A′+3IA=A\’+3I,两个矩阵特征值相同,而其特征值刚好相差
3
3。也就是如果给一个矩阵加上3I3I,则它的特征值会加3
3,而特征向量不变。所以可以得出结论:
1. 如果Ax=λxAx=\\lambda x,则(A+3I)x=λx+3x=(λ+3)x
(A+3I)x=\\lambda x+3x=(\\lambda+3)x,所以x
x还是原来的xx,而λ
\\lambda变为λ+3
\\lambda+3。
2. 特征值之和等于矩阵的迹;特征值之积等于矩阵的行列式。∏i=1nλi=detA
\\prod_{i=1}^n\\lambda_i=\\det A
3. 关于特征向量认识的误区:已知Ax=λx,Bx=αx
Ax=\\lambda x, Bx=\\alpha x,则有(A+B)x=(λ+α)x
(A+B)x=(\\lambda+\\alpha)x,当B=3I
B=3I时,在上例中我们看到,确实成立,但是如果B
B为任意矩阵,则推论不成立,因为这两个式子中的特征向量xx并不一定相同,所以两个式子的通常情况是Ax=λx,By=αy
Ax=\\lambda x, By=\\alpha y,它们也就无从相加了。
证明2:
在例1中有:
det(A)=λ2−6λ+8=λ2−trace(A)λ+det(A)
det(A) = \\lambda^2-6\\lambda+8 =\\lambda^2-trace(A)\\lambda+det(A) 矩阵的迹等于特征值之和。
将
det(A−λI)=0
det(A−λI)=0展开会得到
λ
λ的nn阶多项式,多项式的解就是矩阵
A
A 的特征值。 根据多项式根与系数的关系,解之和(即特征值之和)等于
λn−1
λ^{n−1 }的系数。举例一元二次方程
ax2+bx+c
ax^2+bx+c之求根公式是
x1,2=−b±b2−4ac√2a
x_{1,2}=\\frac{−b\\pm\\sqrt{b^2-4ac}}{2a},解之和
x1+x2=−ba
x_1+x_2=\\frac{−b}{a},其中
a=1
a=1,所以解之和为
−b
−b。
而行列式展开式(n阶多项式)中只有对角线的积这一项包含的
λn−1
λ^{n−1}(其它项最高是
n−2
n-2 次方),而其系数为矩阵A 的迹。因此特征值之和与矩阵的迹相等。
2.2例2
再来看旋转矩阵的例子,旋转
90∘
90^\\circ的矩阵
Q=[cos90sin90−sin90cos90]=[01−10]
Q=\\begin{bmatrix}\\cos {90}& -\\sin
{90}\\\\sin {90}& \\cos
{90}\\end{bmatrix}=\\begin{bmatrix}0& -1\\\\1& 0\\end{bmatrix}(将每个向量旋转
90∘
90^\\circ,用
Q
Q表示因为旋转矩阵是正交矩阵中很重要的例子)。
根据上面提到特征值的一个性质:特征值之和等于矩阵的迹和特征值之积等于矩阵的行列式。则对于QQ矩阵,有
{λ1+λ2λ1⋅λ2=0=1
\\begin{cases}\\lambda_1+\\lambda_2& =0\\\\\\lambda_1\\cdot\\lambda_2& =1\\end{cases},再来思考特征值与特征向量的由来,哪些向量旋转
90∘
90^\\circ后与自己平行,于是遇到了麻烦,并没有这种向量,也没有这样的特征值来满足前面的方程组。
我们来按部就班的计算,
det(Q−λI)=∣∣∣λ1−1λ∣∣∣=λ2+1=0
\\det(Q-\\lambda I)=\\begin{vmatrix}\\lambda& -1\\\\1& \\lambda\\end{vmatrix}=\\lambda^2+1=0,于是特征值为
λ1=i,λ2=−i
\\lambda_1=i, \\lambda_2=-i,我们看到这两个值满足迹与行列式的方程组,即使矩阵全是实数,其特征值也可能不是实数,本例中即出现了一对共轭负数。
我们可以说:
1.如果矩阵越接近对称,那么特征值就是实数。如果矩阵越不对称,就像本例,QT=−Q
Q^T=-Q,这是一个反对称的矩阵,于是我得到了纯虚的特征值,这是极端情况,通常我们见到的矩阵是介于对称与反对称之间的。
2.实数特征值让特征向量伸缩而虚数让其旋转。
于是我们看到,对于好的矩阵(置换矩阵)有实特征值及正交的特征向量,对于不好的矩阵(
90∘
90^\\circ旋转矩阵)有纯虚的特征值。
2.3例3
再来看一个更糟的情况,
A=[3013]
A=\\begin{bmatrix}3& 1\\\\0& 3\\end{bmatrix},这是一个三角矩阵,我们可以直接得出其特征值,即对角线元素。来看如何得到这一结论的:
det(A−λI)=∣∣∣3−λ013−λ∣∣∣=(3−λ)2=0
\\det(A-\\lambda
I)=\\begin{vmatrix}3-\\lambda& 1\\\\0& 3-\\lambda\\end{vmatrix}=(3-\\lambda)^2=0,于是
λ1=3,λ2=3
\\lambda_1=3,
\\lambda_2=3。而我们说这是一个糟糕的状况,在于它的特征向量。
带入特征值计算特征向量,带入
λ1=3
\\lambda_1=3得
(A−λI)x=[0010][x1x2]=[00]
(A-\\lambda I)x=\\begin{bmatrix}0& 1\\\\0& 0\\end{bmatrix}\\begin{bmatrix}x_1\\\\x_2\\end{bmatrix}=\\begin{bmatrix}0\\\\0\\end{bmatrix},算出一个特征值
x1=[10]
x_1=\\begin{bmatrix}1\\\\0\\end{bmatrix},当我们带入第二个特征值
λ1=3
\\lambda_1=3时,我们无法得到另一个与
x1
x_1线性无关的特征向量了。
而本例中的矩阵
A
<script type="math/tex" id="MathJax-Element-20032">A</script>是一个退化矩阵(degenerate matrix)。
一个退化矩阵,重复的特征值在特殊情况下可能导致特征向量的短缺。
这一讲我们看到了足够多的“不好”的矩阵,下一讲会介绍一般情况下的特征值与特征向量。
3. 总结
1.特征向量和特征值的由来;
2.3个例子得出的结论(对称矩阵、旋转矩阵、三角矩阵的特征值与特征向量的特点)。




![[转]我国CAD软件产业亟待研究现状采取对策-卡核](https://www.caxkernel.com/wp-content/uploads/2024/07/frc-f080b20a9340c1a89c731029cb163f6a-212x300.png)




暂无评论内容